Hi!
I am currently trying to use the python driver. I succeed to make the exemple with jog functions work (even if they are a lot of packet drop, and no ack back). However, I haven’t succeed to create precise (x,y,z) setter with these function (too much latency maybe), the resulte was really bad (staircase jerky movements, turn around target point with 4cm error, delay …).
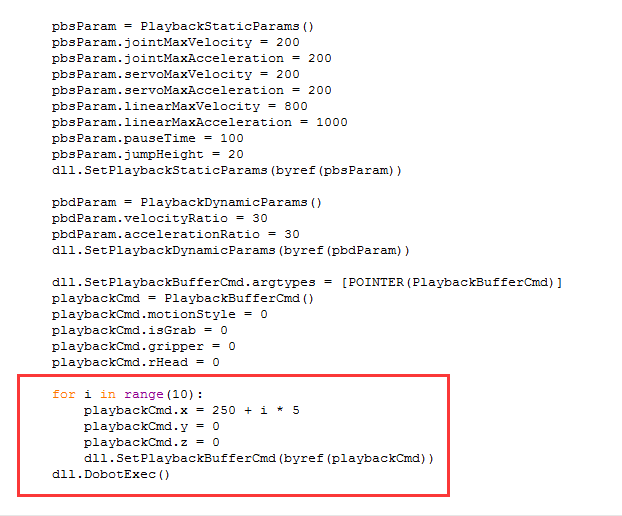
Then I decided to use the playback function which seems more approriate for that. I have adapted the sample code to this function, but Dobot does not move, and I can’t figure out why … Here is my code:
import sys
from ctypes import *
import threading
import time
import msvcrt
def PeriodicTask():
dll.PeriodicTask()
threading.Timer(0.1, PeriodicTask).start()
def GetPoseTask():
pose = Pose()
dll.GetPose(byref(pose))
print 'Pose:', pose.x, pose.y, pose.z, pose.rHead, pose.joint1Angle, pose.joint2Angle, pose.joint3Angle, pose.joint4Angle
threading.Timer(0.5, GetPoseTask).start()
# For initial pose
class InitialPose(Structure):
_fields_ = [("joint2Angle", c_float), ("joint3Angle", c_float)]
# For pose
class Pose(Structure):
_fields_ = [
("x", c_float),
("y", c_float),
("z", c_float),
("rHead", c_float),
("joint1Angle", c_float),
("joint2Angle", c_float),
("joint3Angle", c_float),
("joint4Angle", c_float),
("isGrab", c_byte),
("gripper", c_float)
]
# For jog
class PlaybackStaticParams(Structure):
_fields_ = [
("jointMaxVelocity", c_float), ("jointMaxAcceleration", c_float),
("servoMaxVelocity", c_float), ("servoMaxAcceleration", c_float),
("linearMaxVelocity", c_float), ("linearMaxAcceleration", c_float),
("pauseTime", c_float), ("jumpHeight", c_float)
]
class PlaybackDynamicParams(Structure):
_fields_ = [("velocityRatio", c_float),
("accelerationRatio", c_float)]
class PlaybackBufferCmd(Structure):
_fields_ = [("motionStyle", c_int), ("isGrab", c_int),
("x",c_float),("y",c_float),("z",c_float),("rHead",c_float),
("gripper",c_float),("pauseTime",c_float),]
sys.path.append(sys.path[0])
dll = cdll.LoadLibrary(sys.path[0] + '//DobotDll.dll');
PeriodicTask()
GetPoseTask()
errorString = [
'Success',
'Warning:Long arm angle not good!',
'Warning:Short arm angle not good!',
'Both long & short arm angle not good!',
'Error:Dobot not found!',
"Error:COM port occupied!",
"Error:No data uploaded!"
]
result = dll.ConnectDobot()
print errorString[result]
if (result < 4):
# Set command timeout
dll.SetCmdTimeout(3000)
## # Set initial pose
## initialPose = InitialPose()
## initialPose.joint2Angle = 45
## initialPose.joint3Angle = 45
## dll.SetInitialPose.argtypes = [POINTER(InitialPose)]
## dll.SetInitialPose(byref(initialPose))
# Set static & dynamic param
playbackStaticParams = PlaybackStaticParams()
playbackStaticParams.jointMaxVelocity = 200;
playbackStaticParams.jointMaxAcceleration = 200;
playbackStaticParams.servoMaxVelocity = 200;
playbackStaticParams.servoMaxAcceleration = 200;
playbackStaticParams.linearMaxVelocity = 200;
playbackStaticParams.linearMaxAcceleration = 200;
playbackStaticParams.pauseTime = 1;
playbackStaticParams.jumpHeight = 1;
playbackDynamicParams = PlaybackDynamicParams();
playbackDynamicParams.velocityRatio = 20;
playbackDynamicParams.accelerationRatio = 20;
dll.SetPlaybackStaticParams(byref(playbackStaticParams))
dll.SetPlaybackDynamicParams(byref(playbackDynamicParams))
dll.SetPlaybackBufferCmd.argtypes = [POINTER(PlaybackBufferCmd)]
test = PlaybackBufferCmd()
test.motionStyle=1
test.isGrab=0
test.rHead=0
test.gripper=0
test.pauseTime=0
test.x=150
test.y=0
test.z=-30
dll.SetPlaybackBufferCmd(byref(test))
print 1
time.sleep(1)
dll.SetPlaybackBufferCmd(byref(test))
dll.SetPlaybackBufferCmd(byref(test))
dll.SetPlaybackBufferCmd(byref(test))
print 2
time.sleep(10)
dll.DisconnectDobot()
Do you have any idea why it doesn’t work? Or how I could have precise move to a target in python ?
Thank you very much for your help!