
Hey There, I need to know what is the coordinate range for x, y, z and r for PTPCmd and for “PTPJUMPXYZMode” mode in Dobot magician.
Coordinates and gripper range for PTPCmd in dobot Magician
marianexyx
#5
Estimated workspace (from: Dobot-Magician-User-Guide-V1.7.0.pdf, page 25 - https://download.dobot.cc/product-manual/dobot-magician/pdf/V1.7.0/en/Dobot-Magician-User-Guide-V1.7.0.pdf):
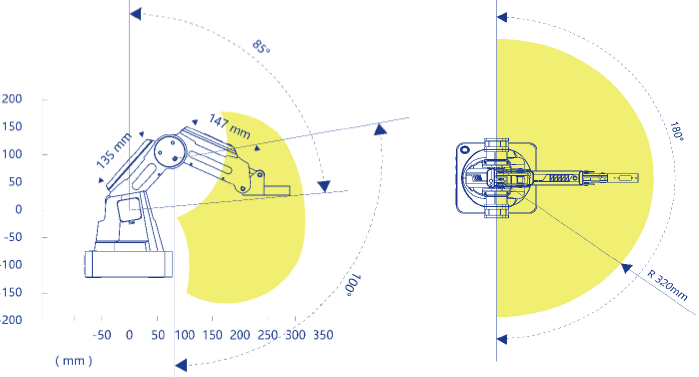
For more precise coordinates, you must determine them experimentally. I’m not sure if there is precise workspace of Dobot available.
Also you can determine when Dobot is out of workspace using Dobot alarms (https://download.dobot.cc/product-manual/dobot-magician/pdf/en/Dobot-Magician-ALARM-Description.pdf). Using alarms an app may be written, that searchs for all acceptable positions, save them in 3D array, and when an alarm occur during searching, arm could come back to safe workspace and proceed with finding next available points in arms workspace.
Propably you can’t determine workspace over all arms, because workspace slightly depends on how dobot was calibrated each time its powered up.