My Dobot Magician is working fine in Dobot Studio and even under Python control using the API.
For my application I am hooking up extra mini servos that I would like to control through the upper arm connectors (EIO8, EIO6, EIO4) of the Dobot Magician.
Using the standard port EIO8, Dobot Studio recognizes the servo and the standard R+, R- controls work ok.
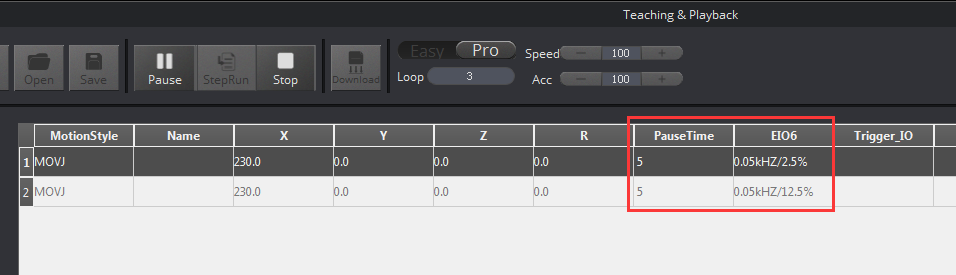
However, using the ‘teaching and playback’ of Dobot Studio and specifying a PWM output on EIO8, EIO6 or EIO4 does not work. I tried different settings for the PWM frequency and Duty Ratio without any result.
How should I hook up servos to these ports to work ?
Regards,
Rudolf Sprik