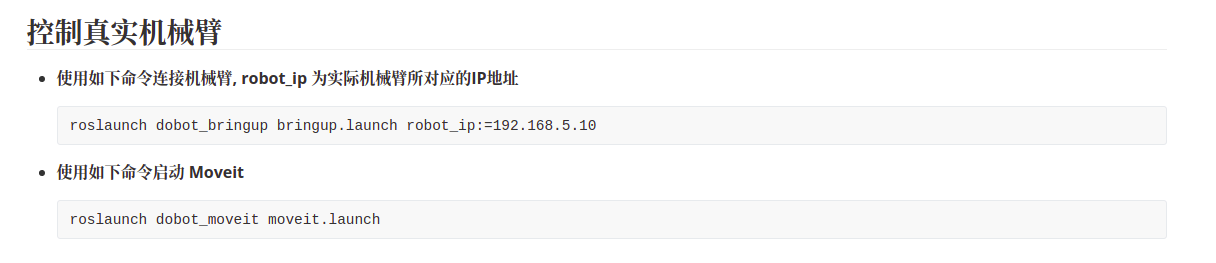
从GitHub 下载或者克隆Dobot TCP-IP-ROS-6AXis 二次开发api程序:git clone https://github.com/Dobot-Arm/TCP-IP-ROS-6AXis.git后根据说明文档控制真实机械臂失败,机械臂通信成功,可通过moveit使能,拖动轨迹球后点击plan成功,但是execute后moveit和真实机械臂都没反应

从GitHub 下载或者克隆Dobot TCP-IP-ROS-6AXis 二次开发api程序:git clone https://github.com/Dobot-Arm/TCP-IP-ROS-6AXis.git后根据说明文档控制真实机械臂失败,机械臂通信成功,可通过moveit使能,拖动轨迹球后点击plan成功,但是execute后moveit和真实机械臂都没反应