
I have a new MG400 I’m having an issue. When I connect to the MG400 I get a loud buzzing sound coming from Joint 4. I checked my setting with our other robot, and they are the same.
I have no load on the arm and can’t seem to get it to stop till I disconnect from it. What am I doing wrong?
MG 400 Joint 4 Buzzing
Dobot
#2
Dear david
We are glad to be of service.
Actually, your problem is quite complex and it is difficult for us to provide an immediate solution.
We recommend that you send specific information to the email address: support@dobot.cc
We recommend that you provide information such as,product model, Serial Number,software version, hardware version information (which can be found in the software), video of the exception and specific engineering files.
We will have experts at your service.
Best wishes
KazLi
#3
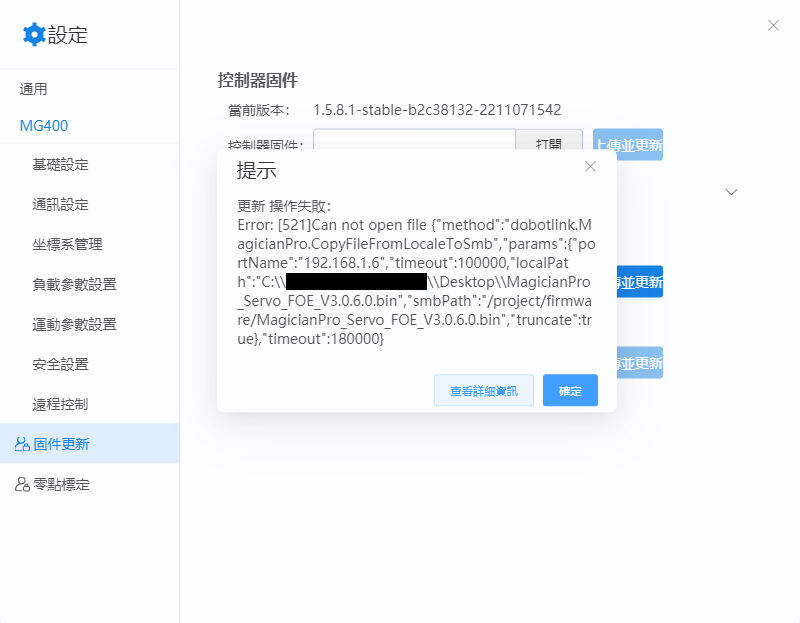
I guess there’s the same problem with my MG400. I contacted CS department in Japan(TechShare) then got a hardware firmware file (servo update) for update but error occurs. Can I get some help?
Dobot
#4
Dear KazLi
Glad to see u here,could you provide the following information?
- The original controller version and servo version.
- why you want to upgrade.
- The specific phenomena and alarms of the failure before the upgrade.
Thank you for your patience, we will solve your problem soon.
Best wishes
qyhj617
#5
Dear David, KazLi and Dobot supporter:
I meet the same problem.
No load and I set all load parameter to 0.
Not sure if it’s only J4, but the high frequency noise is annoying.
I see the same problem at youtube video 19:21
https://youtu.be/6nGexb_i0aM.
do we have a way to solve this problem?
the pitch in the video is much higher then the one I’m experiencing mine is not a high pitch and can be heard in other offices due to how loud it is. my joint 4 will overheat and become hot to the touch if I let it run like that for a few minutes.
I emailed the support team more info, but It is a new machine and starts buzzing when I connect to the DOBOT MG400. I’ll upload a video when I get one.
Dobot
#7
Hello,david and qyhj617
nice to see u here.
Your question needs to be dealt with by email,I have a few different questions to ask you.
1.Is your mg400 the gearbox version?
2.What is your firmware version?
3.Is it the J4 motor that is heating up?
4.Was the machine like this from the start, or did it occur during use by the user?
5.If it occurred during the user’s use, what actions did the user take?
6.Can you tell me your Serial Number?
7.Were any warnings reported?
8.What are the circumstances under which this anomaly occurred?
9.Please attach a video if you can.
Please send them to the following email address: support@dobot.cc
Thank you for your patience,I am talking to the expert and hope to solve your problem as soon as possible.
best wishes
The machine is brand new this was the first time connecting to the robot when the issue was noted. I don’t know what is meant by gearbox version. please provide details on how to find that info.
Joint 4 is physically hot to the touch when the buzzing sounds is occurring (I don’t know if its the motor getting hot as I have not taken joint 4 apart)
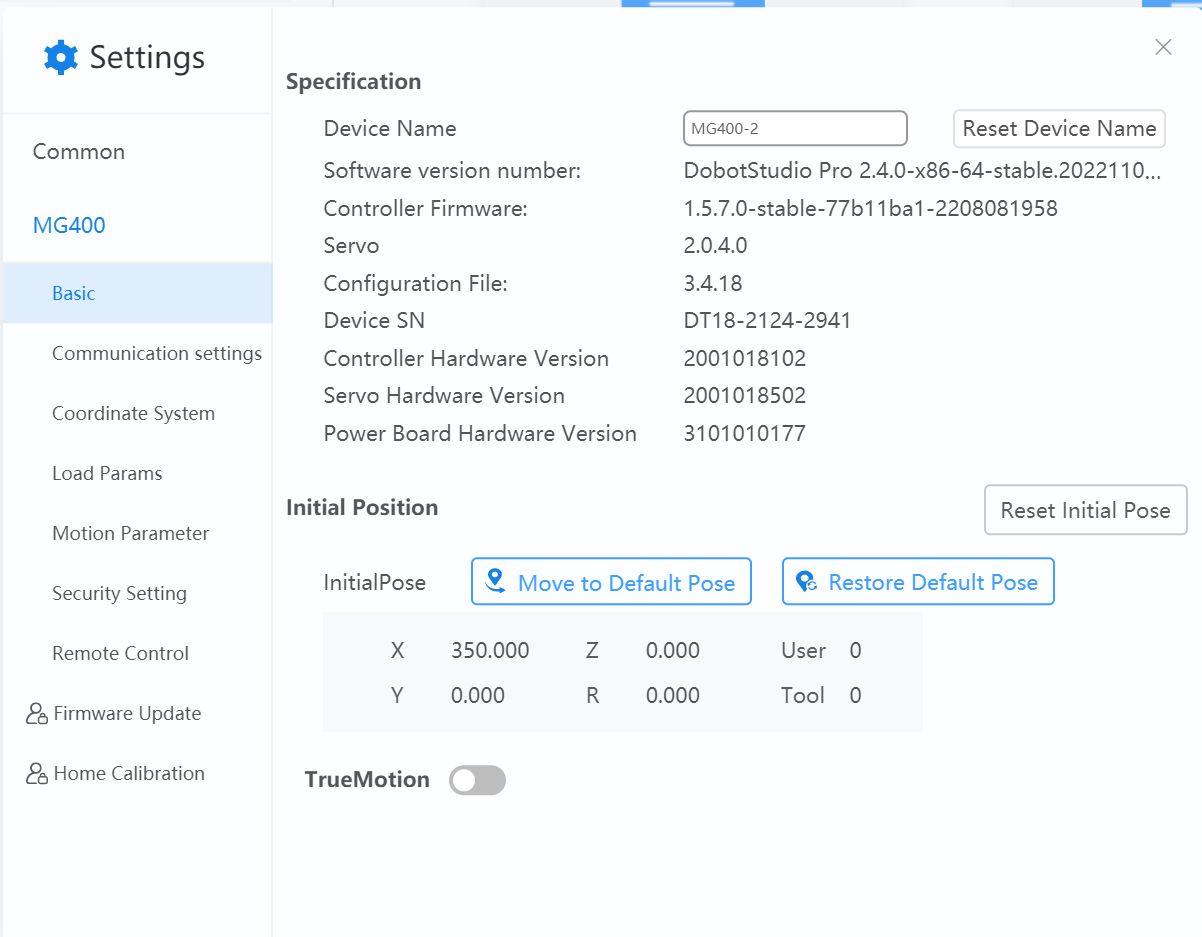
The firmware version is in the email I already sent last week regarding your first set of questions. but here it is again on this thread.
Dobot
#10
Dear David,
Can you tell me which country you are in, I will contact the corresponding FAE engineer to contact you. If possible, we will start the after-sales service.
Best wishes
CzechDave
#12
I was fighting with the J4 buzzing from the start as well. The axis does buzz because its encoder keeps sending unstable data to the controller, making the stepping motor swinging furiously forth and back. The Load parameter (Payload) should be set to a reasonable value, not 0 (in our case I set it to 10g with nothing mounted on the J4). I had to set the parameter repeatedly and buzzing then stopped. But later the J4 reported lost connection to the encoder and corresponding servodrive error. We had to take the J4 motor housing apart - with the blessing of the Dobot support - and reset the connectors leading to the motor. The connector is secured by some type of glue or plastic fixer, which problably caused a pin in the connector occassionally losing contact with its counterpart… which could actually be the reason for the buzzing, now when I’m thinking abouit it. Anyway, the J4 works now and I do really hope it keeps working :).
Dobot_Jimmy
#13
Hi I’m Jimmy from Dobot FAE team.
The buzzing and burning are related to the reducer of MG400.
Step 1 Check your MG400 reducer.
You can first try to rotate the iron column on the J4 axis to judge whether it is smooth or not.
If it is not smooth, it means that your machine is the version with reducer. If there is no resistance to rotation, it is without the reducer version. You can compare with your other robot.
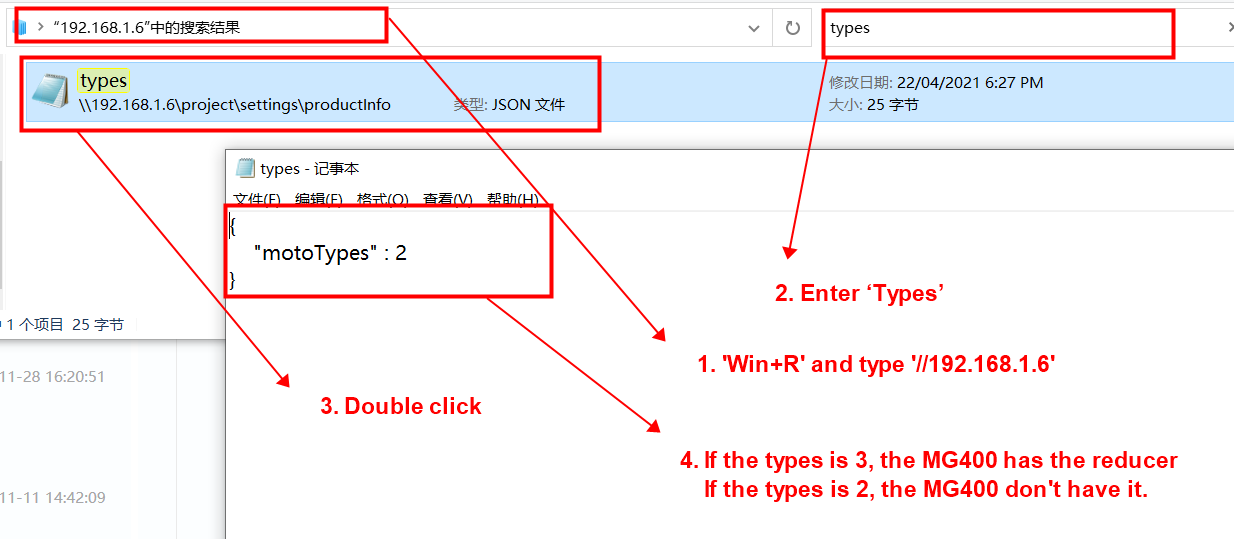
Step 2 Modifying File Parameters.
As the attachment (reducer.png).
If your MG400 has the reducer, but the type shows ‘2’, change it to ‘3’.
IF your MG400 without the reducer, the type shows ‘3’, change it to ‘2’ .
Geared motor for MG400 J4

david.verellen
#16
So the problem got solved
Issue:
Joint 4, loud buzzing noise. Youtube video below of problem
(youtube.com/shorts/iIBCpVv0dIY)
solution:
There are 2 models for the MG400. One that has a reducer on joint 4 and one that does not.
The model that does not have a reducer has 2 motors that can be used.
Each motor type whether with or without a reducer require a different value in the Types file.
In my case, mine required me to change the motor type in the types.json file to a 1 (known as a Wuxi motor) rather than 2 (It was set at 2 when it was received).
If you have a reducer on your Joint 4 motor then the motor type should be set to 3.
Hope this helps anyone else having this problem. Thanks everyone!