# 1. Overview
Dobot industrial robots now support two remote control modes: **remote I/O mode** and **remote Modbus mode**. For details about the control mode, see Setting > Remote Control in *Dobot CRStudio UserGuide*.
The above two modes are mainly for the **remote control of running scripts**. As the communication based on TCP/IP has high reliability, strong practicability and high performance with low cost, many industrial automation projects have a wide demand for control robots that support TCP/IP protocol. So CR/MG400/M1 Pro robots, designed on the basis of TCP/IP protocol, provide rich interfaces for interaction with external devices.
In terms of the controller version to support TCP/IP protocol, CR series controller version should be V3.5.1.19 or above, and MG400/M1Pro controller version should be V1.5.5.0 or above.
# 2. Message Format
According to the design, CR/MG400/M1 Pro robots will open 29999, 30003, 30004, 30005 and 30006 server ports.
Server port 29999 (hereinafter referred to as Dashboard port) is responsible for receiving some simple commands by sending and receiving one by one. That is, after receiving the agreed message format from the client, the Dashboard port will give feedback to the client.
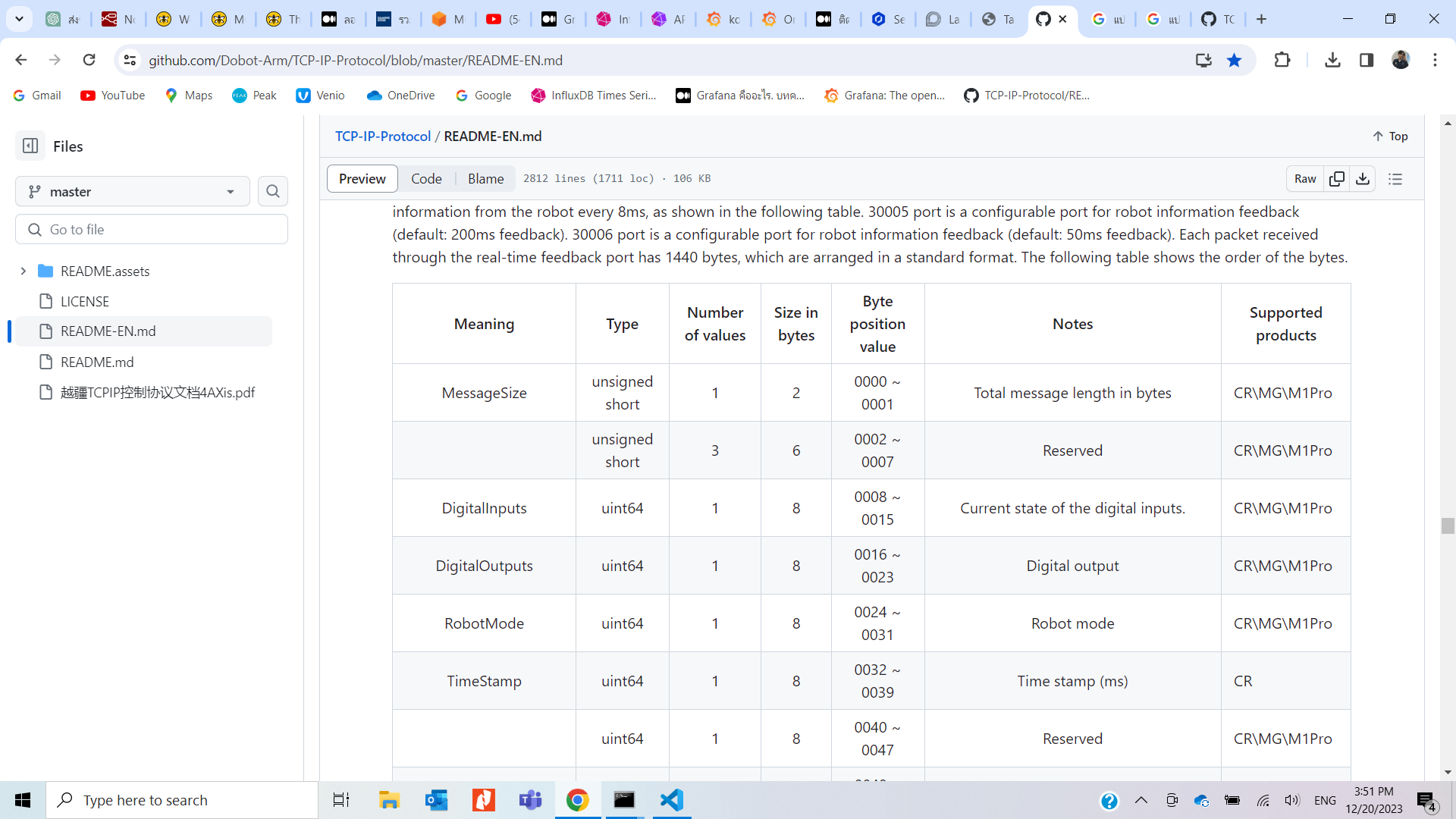
Server port 30003 (hereinafter referred to as the real-time feedback port) feeds back the robot information. It only receives the agreed message format from the client but does not give feedback. (Note: Port 30003 port is split into port 30003 and port 30004, which is expected to be implemented in controller version 3.5.2. Controller version 3.5.1 currently has only one 30003 port for real-time feedback or sending motion commands.)
This file has been truncated. show original