Hey!
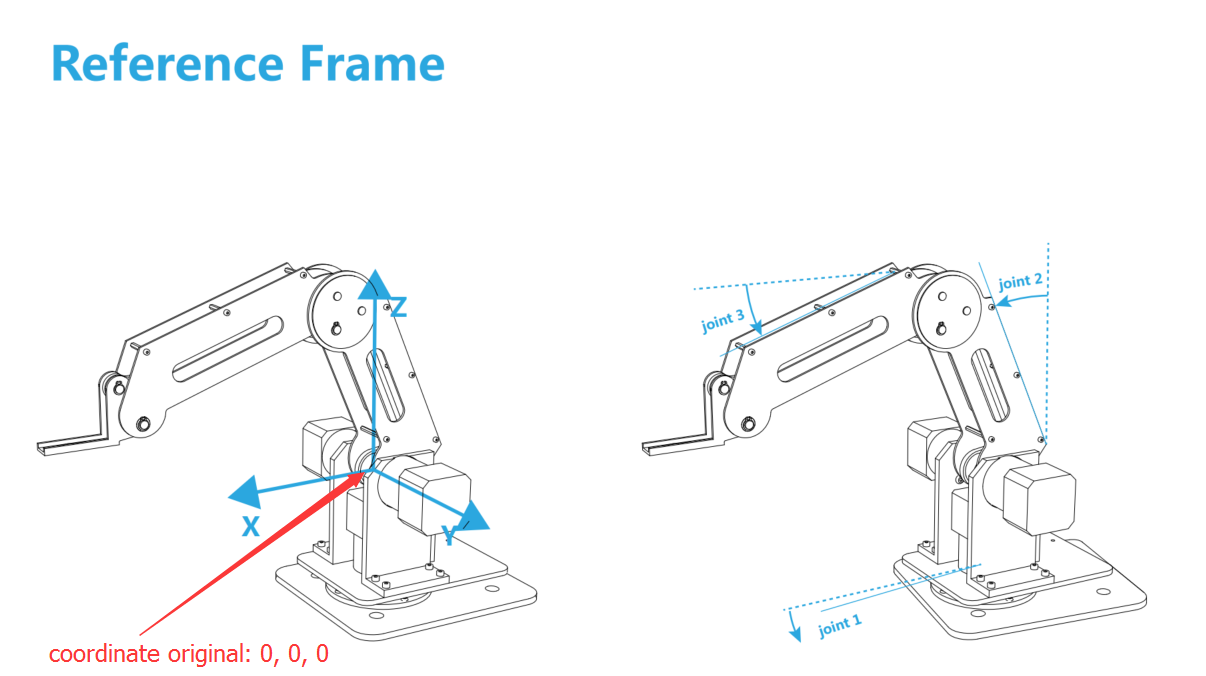
I can access the position of the robot with the serial protocol but I haven’t found a drawing that defines this pose. So for example if have z = 50, where do I have to put a ruler to measure this distance?

Hey!
I can access the position of the robot with the serial protocol but I haven’t found a drawing that defines this pose. So for example if have z = 50, where do I have to put a ruler to measure this distance?
No it doesn’t. The question was about the position of the gripper. Could you mark the position of the gripper in this drawing?
ok, maybe I get your question: if I chose Gripper in the Main window, then which point is using as the target point? is this what you are asking?
I will get back to you once I confirmed the answer.
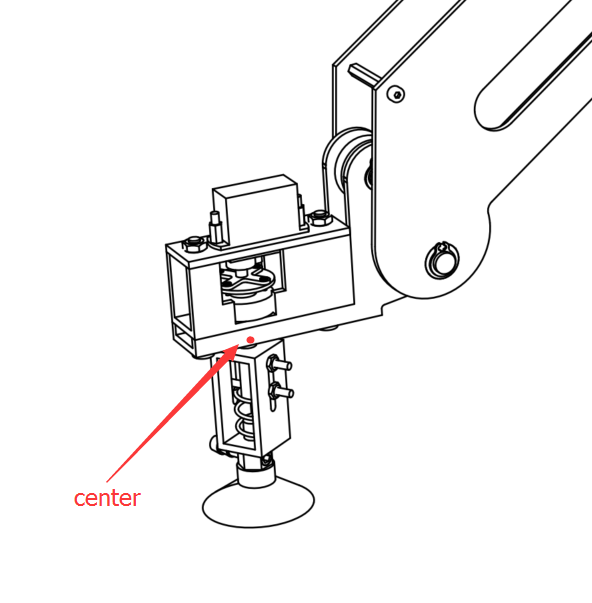
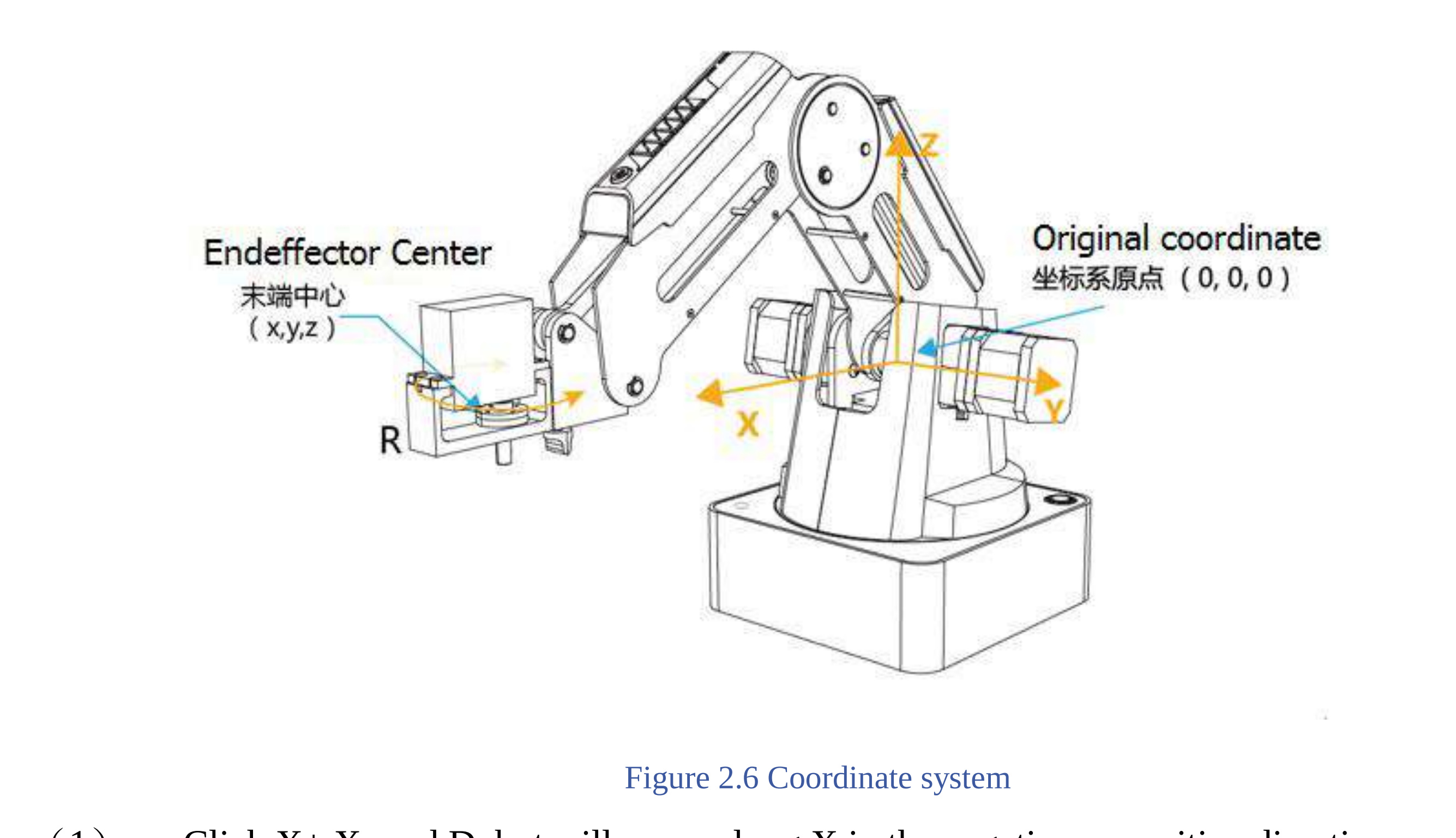
as discussed with our enginneer, at this moment, the center of the axis 4 is used as the target point for both Gripper and Suction Cap. the reason is that both two end effector is connectedd to the axis 4 .
And can you tell how this (x,y,z) center point shown in the picture is calculated from angles?
Hi,
This is a little different from the picture in the recent documentation.
Could you please confirm the existing gripper center? More specifically, I need to know the height from the suction cup to the center of the gripper space.