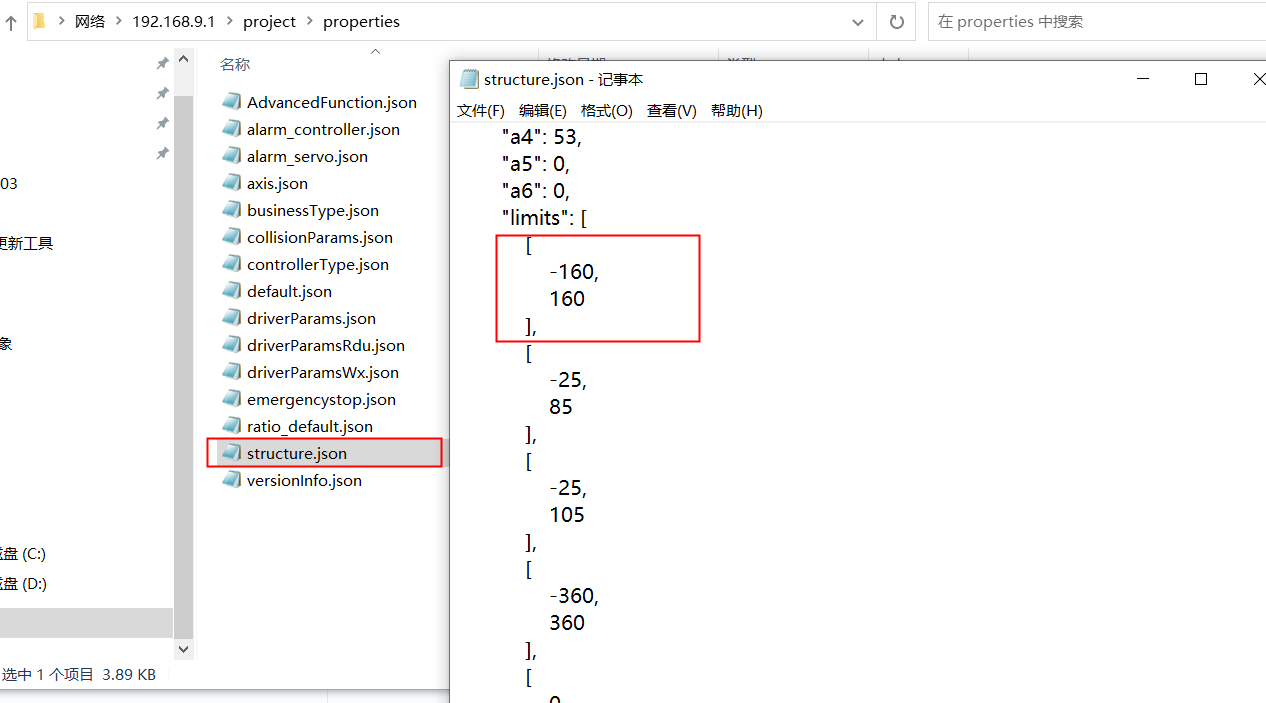
Hi I am using a dobot cr3 and today i tried to work on the opposite quadrant of the circular workspace (the one that includes the cable). There seems to be some angle limit on joint 1, and this prevents me to work on the other half of the workspace (i can only move J1 for 180 degrees). How can I disable this limit so I can move the robot 360 degrees?
Please help, and thanks in advance!