Hi
For a school project I am supposed to control the Dobot Magician using Labview. I have already successfully installed the necessary packages using VI Package Manager (Magician_SDK_For_Labview).
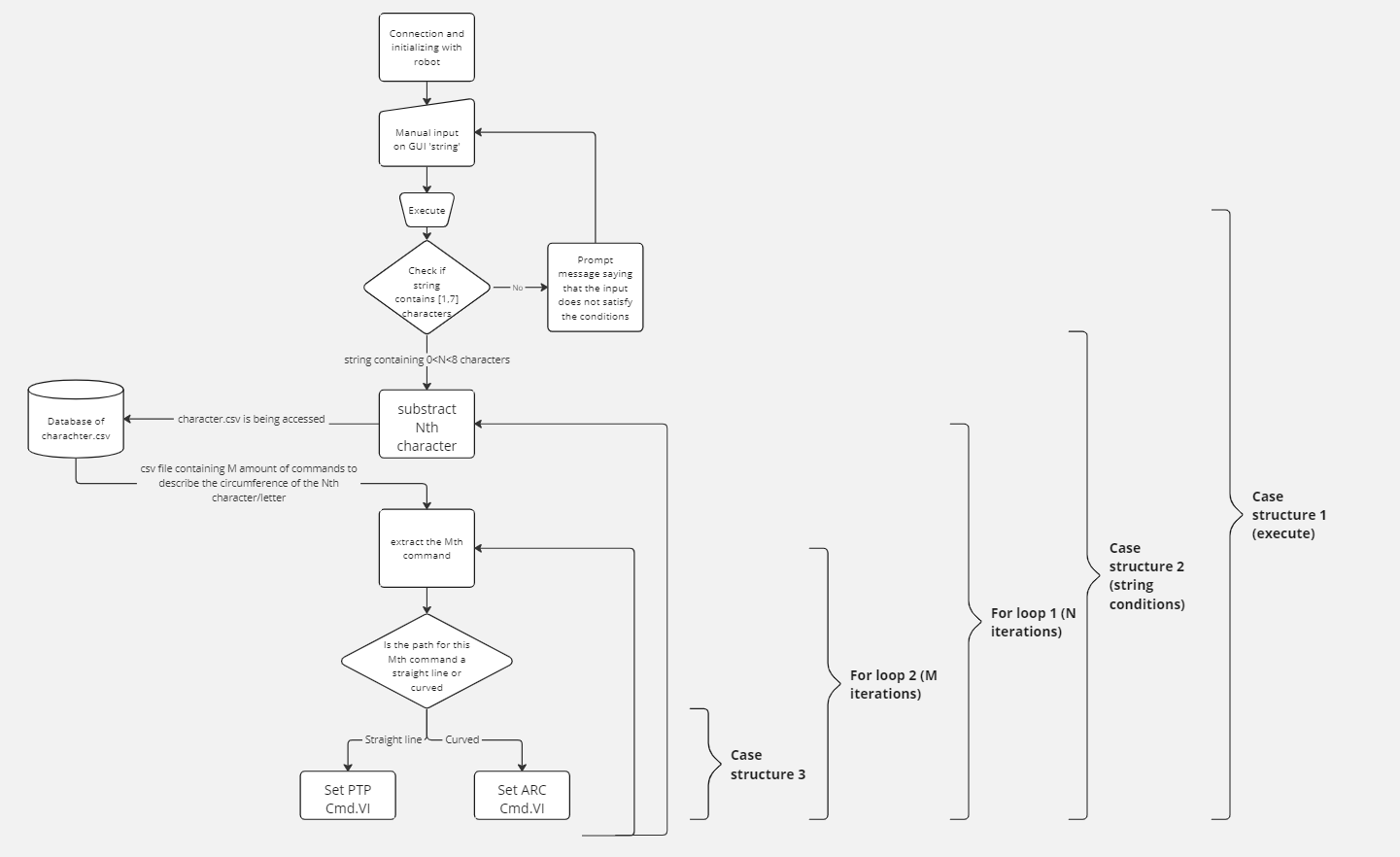
My intent is to ask the user a string in the GUI, iterate over the string for each character and based on the specific character, access a CSV file that contains a list of coordinates and necessary parameters for the robot concerning the movement method (jump, movL_xyz,…). Each line in the csv file will provide the necessary coordinates for the “Set PTP Cmd” or the “Set ARC Cmd” function blocks.
The problem I’m running into is the fact that only 16 commands (16 lines in the CSV files ) are ran before the robot just stops. There is no error, the 17th command is within range of the robot workspace etc. so I can’t seem to figure out why the robot just stops executing the commands, the moment the robot stops I can restart the functionality and then again it stops just before the 17th command.
The point to point and arc commands are wrapped inside different loops/structures:
Timed Loop[ Case Structure[ Case Structure[ For loop[ For loop[ case structure[ PTP/ARC command ] ] ] ] ] ]
If anyone has any experience with multiple commands i.e. 50+ sequential commands/functions using the DOBOT function blocks, feel free to share any tips or solutions.
If needed I can provide my labview file itself.
Thank you