Hi, here is a description about how to calibrate the angle sensors.
Step 1. Disassemble the two angle sensors form the robot arm. Loosen the screws and take it out of the slot, but keep it connected with the cable.
Step 2. Turn on the power, and put the two sensors on a table, as horizontal as possible.
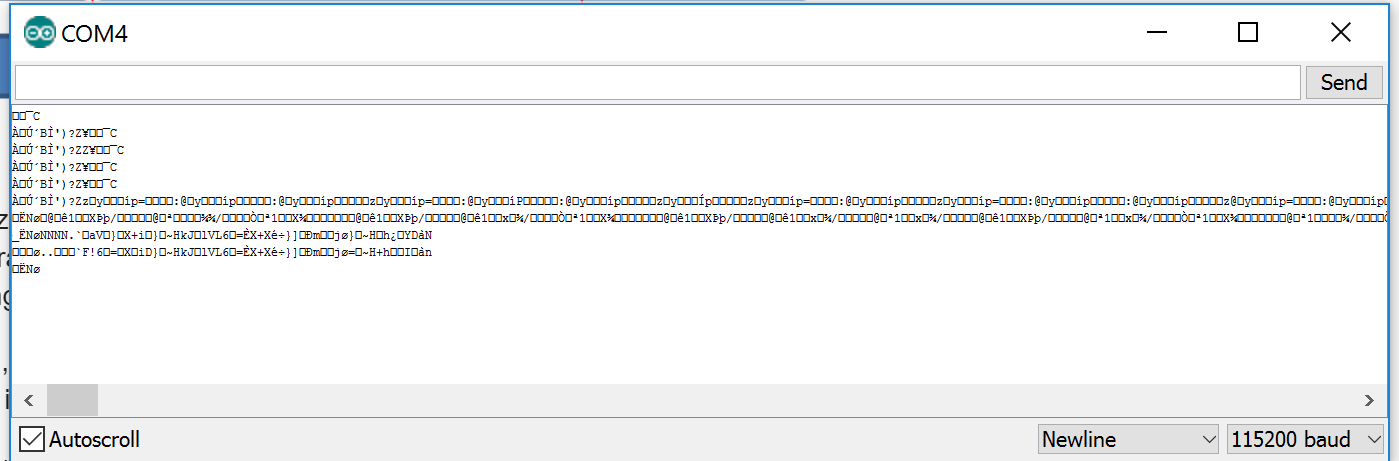
Step 3. Find a “COM Bug assistant”, or just the COM tools in the Arduino. Set the BAUD rate as 256000(which is currently used), open the port, and you may see some random data like this:
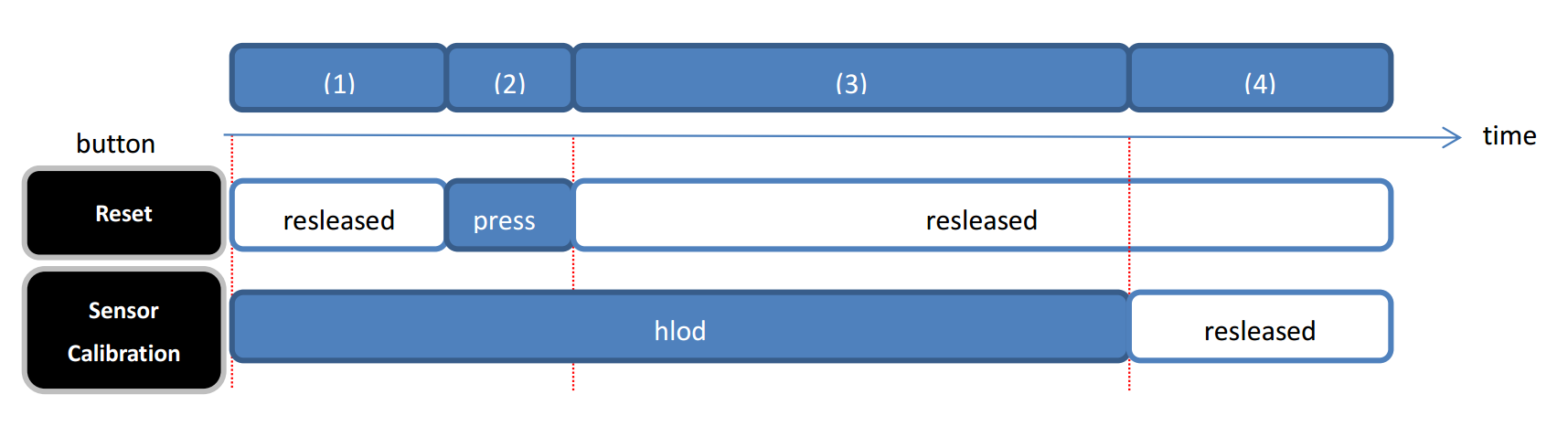
Step 4. Operate like this to enter the calibration mode:
1)start
2)Reset once
3)hold Sensor Calibration for MORE than 2 second after Reset
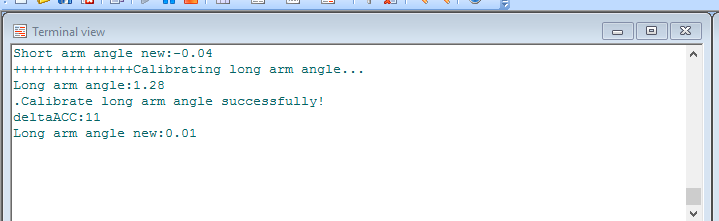
4) release the Sensor Calibration to enter the calibration mode, you will now read “Start calibrating…” at the COM tool’s window
Step 5. Put the two angle as horizontal as possible, and then press the Sensor Calibration to calibrate the sensor. Two sensors will be calibrated one by one.
So press once to calibrate the long arm(rear arm), press again to calibrate the short arm(forearm).
-
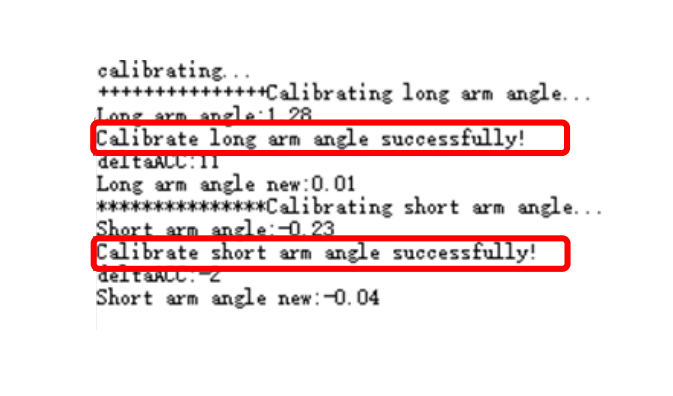
If the calibration is successful, you will read “Calibrate long/short arm angle successfully!”, then calibrated data will be written into the Arduino. And you can just reset and the calibration is finished.
-
If the sensor is not in a horizontal place, the calibration will be failed, you will read “** failed, need to be re-calibrated !!!**”, . And you can repeat Step 5 until both two sensors are successfully calibrated.
note:
1. after reset or power off, the calibration information won’t lost. It is written to the eeprom and used next time.
2. if you are going to use a different firmware, lets say, you may late use a new firmware with a baud rate 9600, then in Step 3, the baud rate should be changed to 9600 as well.
Feel free to make comments if you have any question.