
Hi,
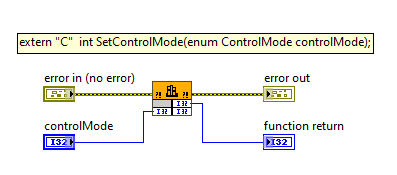
i am using LabView2019 (x64) and trying to communicate with the MG400. The official demo is not running properly. The “SetControlMode” function in the dobot.dll is ignored, I cannot set the MG400 to the “enable” status. The other functions are running. If I switch on the MG400 via the DobotStudio, I can also execute “move” commands with LabView.
Can someone help me here?
I also miss the circle and arc function in “dobot.dll”.
Regards
Ralle
MG400 and LabView
ralle
#1
Dobot
#2
Hi Ralle, sorry to tell you that we will no longer provide any support for the SDK as secondary development tools. Instead of SDK, now we are providing a new way to do it, which is to use with TCP/IP. You can check this link for more details: https://github.com/Dobot-Arm/TCP-IP-Protocol/tree/EN-Version
ralle
#3
Thank you for your prompt reply. In order to be able to use the new way with TCP/IP, I need the latest firmware for our MG400. Version 1.5.1.4.20210428183506 is currently installed.
Thanks very much.
Dobot
#4
Hi Ralle, I just create a new topic on this question and you can find the download link in this one: MG400 Controller Firmware 1.5.4.0 Update
tjay78
#5
HI Ralle
Have you found a solution to this yet ???
Sitting with the same problem right now…
tjay78
ralle
#6
Hello tjay78,
With the latest firmware (1.5.5.0) a lot more works via the TCP/IP protocol, but unfortunately still not all commands as described in the instructions. I hope dobot will continue to improve here …
Currently I can activate the MG-400, drive to a certain position and start a script written via the DobotSCStudio. I can handle that for now. What still doesn’t really work is the real-time output of the current position and status. Nobody can explain the circular function to me either.
Regards
Ralle
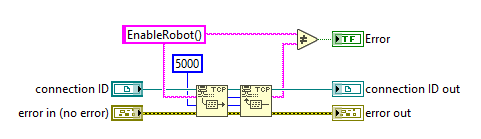
Example of a sub-program to activate the MG400:
tjay78
#7
HI Ralle
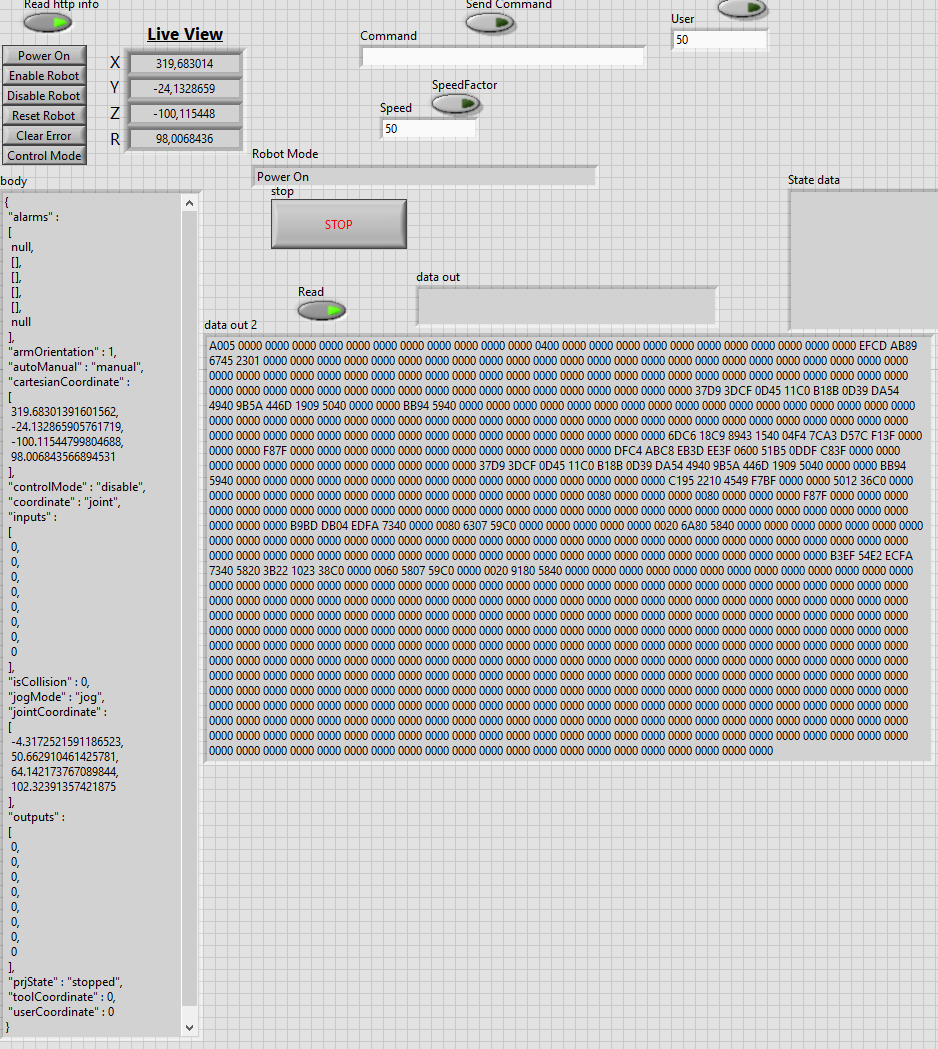
I wanted it in “Idle” mode, so I figured it out by doing this…
And there are two ways to do this, to show Live View…
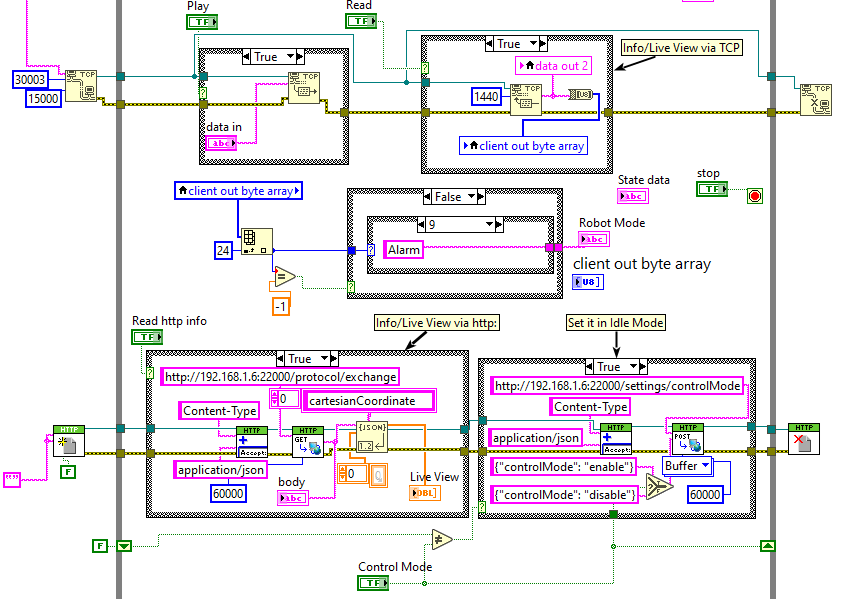
And yes there is a lack of information, hope they get updated soon
I also miss the function jump but it will probably come soon
Info:
TCP / IP protocol is very slow to update 2-3sec.
http protocol is very fast real time update

tjay78
ralle
#8
Hi tjay78,
thank you for your example! With the status reports via the “http-protocol”, I can get on with it.
You make my day!
Ralle