I have tried using blocky and teach programming methods and I’m stuck on the same issue
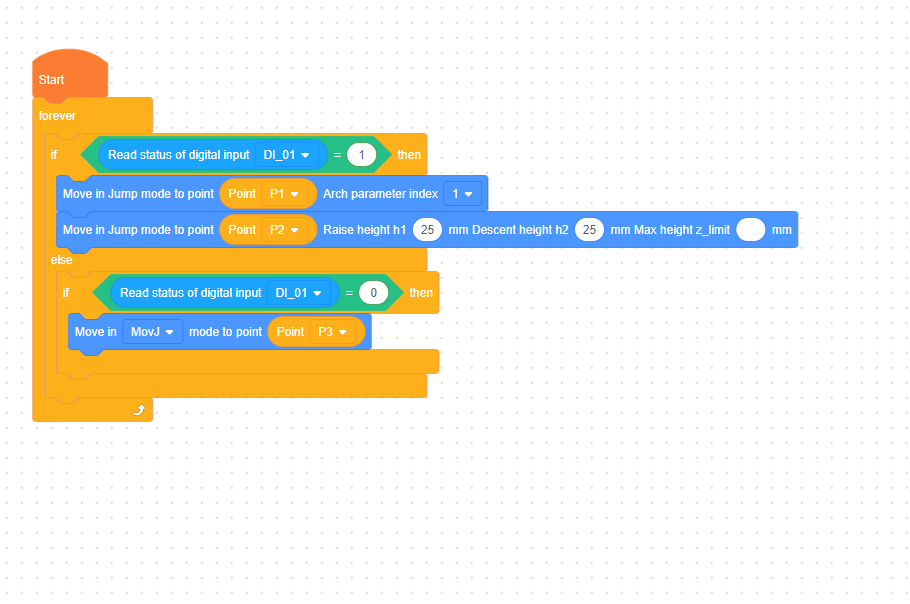
I am sending 24V to input 1 for 1 second and it turns off. I only want the dobot to run the motion 1 time and then wait until input 1 goes high again which may be 30 seconds, 5 minutes, whatever. The script begins correctly, the MG400 waits until my input trigger happens, but the script then keeps running again and again even though the input has gone low and the if statement no longer matches correctly.
When input 1 = 0, it should go to its waiting position at P3. Instead it runs about dozen times from P1 to P2 even though the if statement does not match true. It does eventually stop on its own some 35-40 seconds later. I can verify looking at the I/O panel that input 1 goes high and goes back low as intended. Not sure whats going on here! Heres a screenshot of my code.
Thanks in advance