Hello i have a short question regarding problem i am facing.
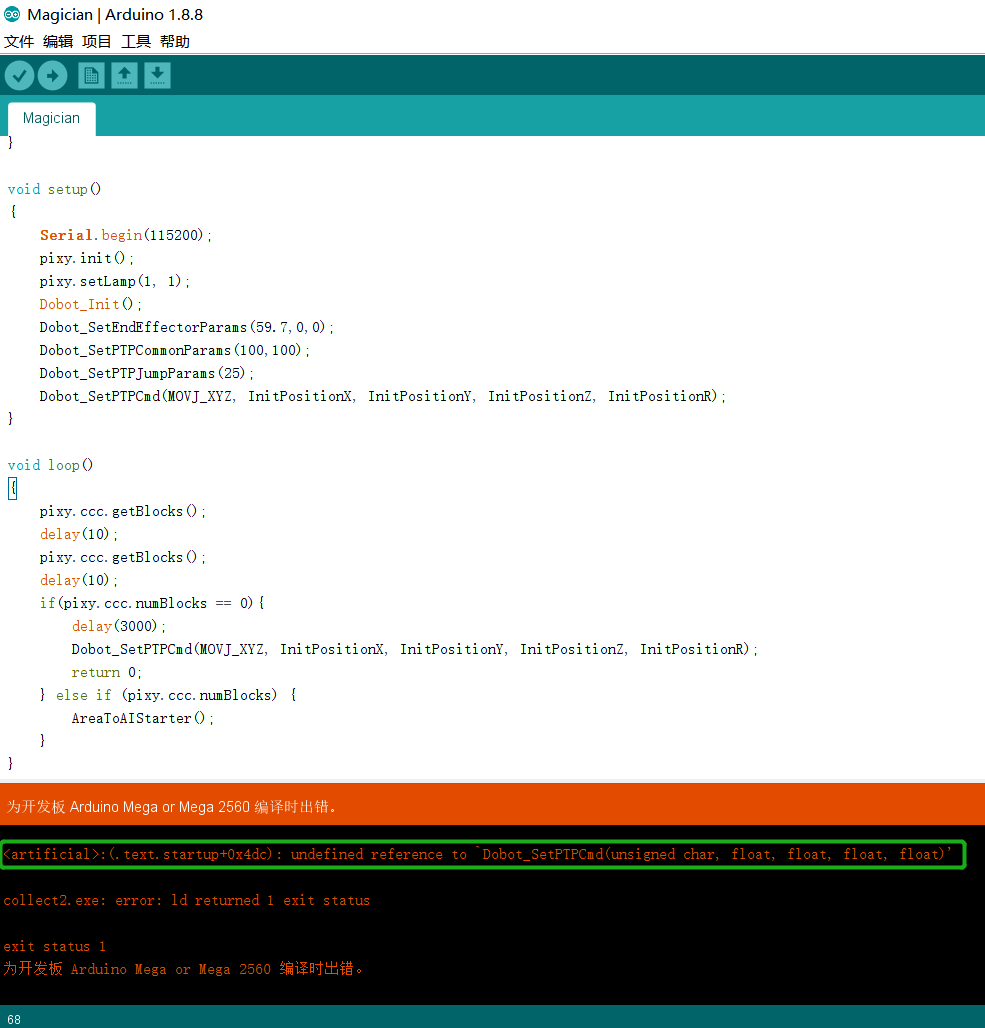
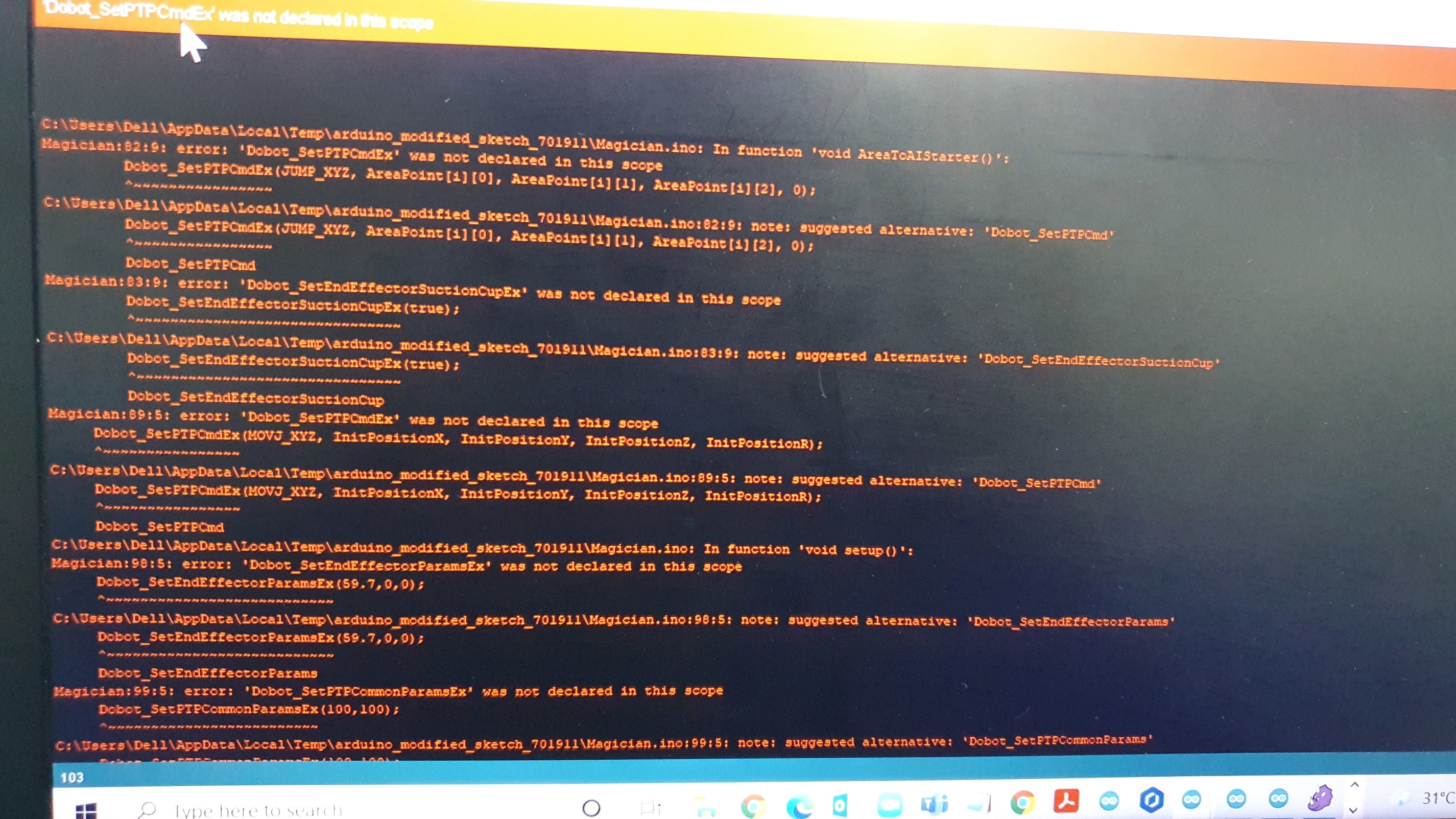
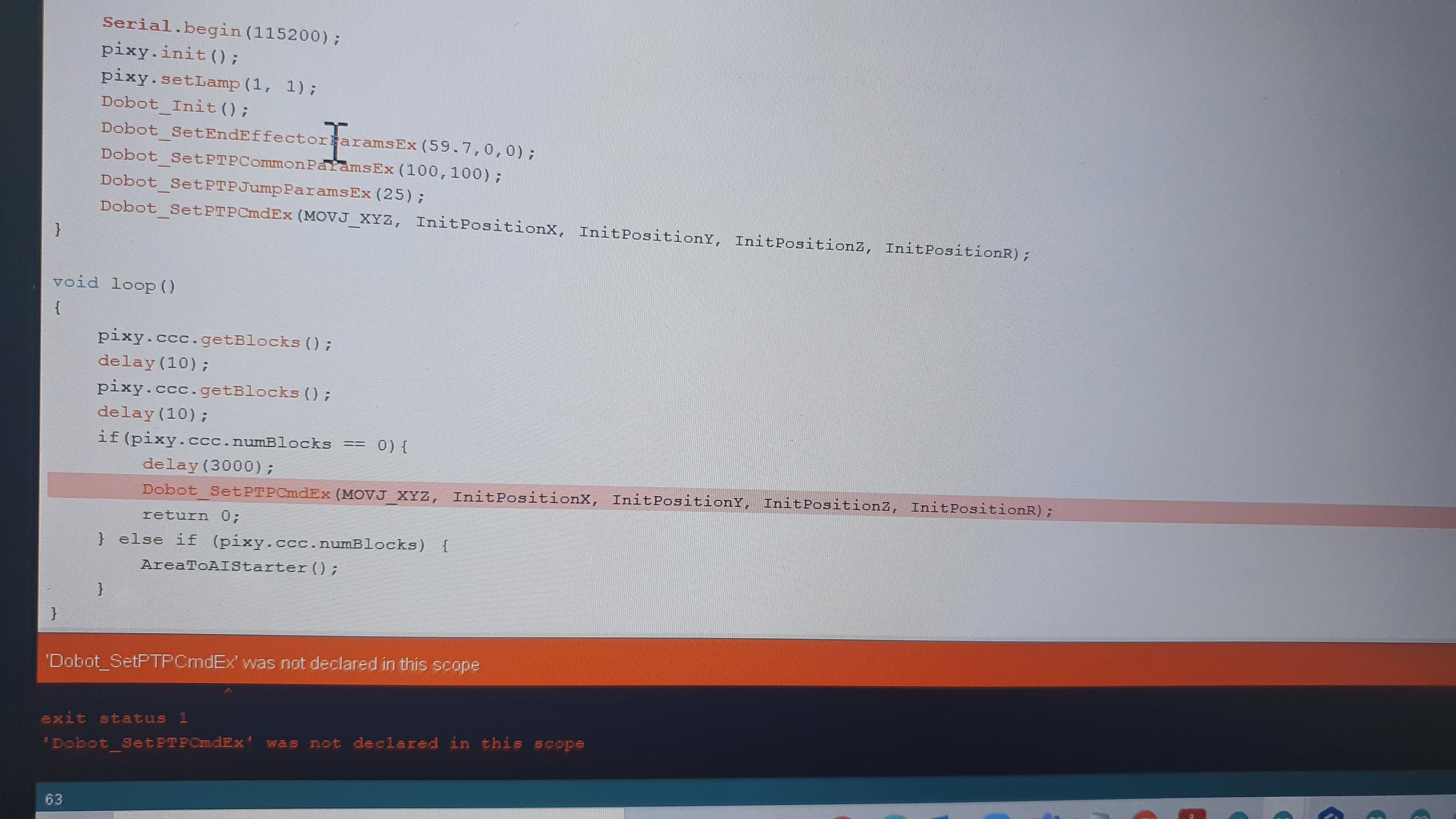
Currently i am using the Arduino program for Ai Starter Cooperation with Magician Demo provided from Dobot website but i having issues with verify and upload it. It shown error for “Dobot_SetPTPCmdEx was not declared in this scope”.
How do i solve this problem? Is there an Arduino programming file for this demo with this problem already solved? Also noted that i am also novice at Arduino Programming as i am still learning about it.
Thank you for your time
The Arduino Program are these:
#include <Arduino.h>
#include <Dobot.h>
#include <Pixy2.h>
#include <Pixy2I2C.h>
#include <Pixy2CCC.h>
#include <TPixy2.h>
Pixy2I2C pixy;
bool flag = true;
#define InitPositionX 260
#define InitPositionY 0
#define InitPositionZ 60
#define InitPositionR 0
float AreaPoint[4][3] = {
{137.05, -206.94, -39},
{137.05, -244.31, -39},
{100.50, -206.94, -39},
{100.50, -244.31, -39}
};
float trayPoint[4][3] = {
{308.12, 25.92, 28},
{308.12, -15.92, 28},
{258.12, 25.92, 28},
{258.12, -15.92, 28}
};
/********** 从方块区吸取方块,放置托盘 **********/
void AreaToAIStarter()
{
for(uint8_t i=0; i<4; i++){
Dobot_SetPTPCmdEx(JUMP_XYZ, AreaPoint[i][0], AreaPoint[i][1], AreaPoint[i][2], 0);
Dobot_SetEndEffectorSuctionCupEx(true);
Dobot_SetPTPCmdEx(MOVL_XYZ, AreaPoint[i][0], AreaPoint[i][1], AreaPoint[i][2]+70, 0);
Dobot_SetPTPCmdEx(JUMP_XYZ, trayPoint[i][0], trayPoint[i][1], trayPoint[i][2], 0);
Dobot_SetEndEffectorSuctionCupEx(false);
Dobot_SetPTPCmdEx(MOVL_XYZ, trayPoint[i][0], trayPoint[i][1], trayPoint[i][2]+30, 0);
}
Dobot_SetPTPCmdEx(MOVJ_XYZ, InitPositionX, InitPositionY, InitPositionZ, InitPositionR);
}
void setup()
{
Serial.begin(115200);
pixy.init();
pixy.setLamp(1, 1);
Dobot_Init();
Dobot_SetEndEffectorParamsEx(59.7,0,0);
Dobot_SetPTPCommonParamsEx(100,100);
Dobot_SetPTPJumpParamsEx(25);
Dobot_SetPTPCmdEx(MOVJ_XYZ, InitPositionX, InitPositionY, InitPositionZ, InitPositionR);
}
void loop()
{
pixy.ccc.getBlocks();
delay(10);
pixy.ccc.getBlocks();
delay(10);
if(pixy.ccc.numBlocks == 0){
delay(3000);
Dobot_SetPTPCmdEx(MOVJ_XYZ, InitPositionX, InitPositionY, InitPositionZ, InitPositionR);
return 0;
} else if (pixy.ccc.numBlocks) {
AreaToAIStarter();
}
}