
Hi Dobot team and community,
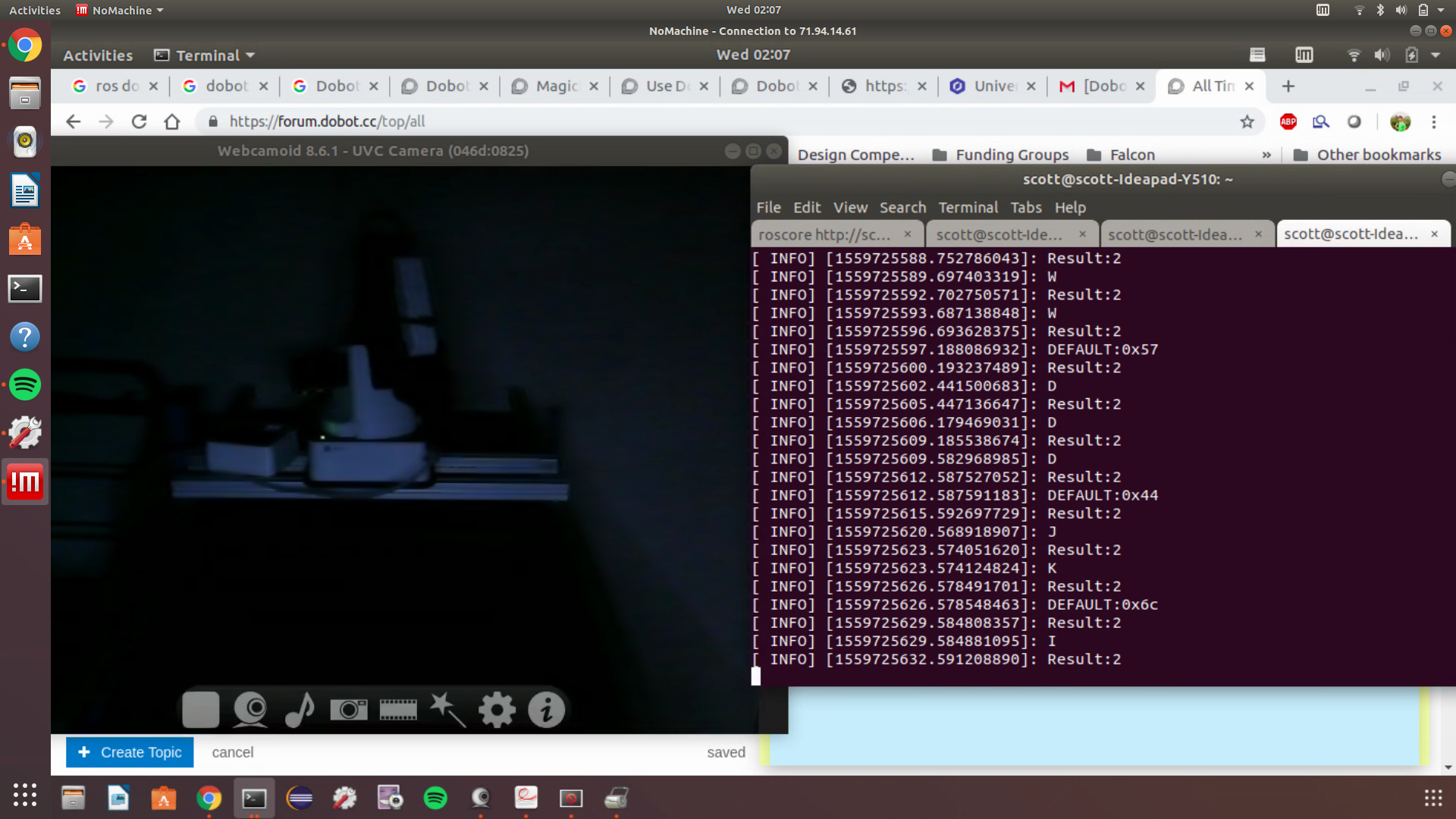
I’ve recently been trying to get my Dobot Magician to work with ROS, and am most of the way there. I have roscore running (and properly configured), and rosrun dobot DobotServer /dev/tty is running fine. My problem is when I run rosrun dobot DobotClient_JOG. The program seems to run fine (e.g. no errors) but won’t actually move the robot. I’ll tap a letter, and it’ll wait for about 2 or 3 seconds, and then post some numbers and “Result: 2”, whatever that means. See attached Screenshot 1 here. I’m working remotely so I’m VM’ing and watching my Dobot on a webcam.
I know the serial communication is working, because I installed “cutecom” to talk to the Dobot at a low level, and when I tell it “aa aa 03 1f 00 00 e1” it will successfully cause the Dobot to move/home. For some reason this forum will only let me attach one image since I’m a new user, so here’s an imgur link for this image. https://imgur.com/Jfmj8lZ
I’ve also tinkered with the ASCII characters, though I don’t think that’s the issue. I’ve found vague mentions on other forums of this ASCII mapping being the cause, but if so, how should I figure out what to map these values to? The program seems to understand when I’m typing one of those keys vs. a non-mapped key. Imgur link here. https://imgur.com/qCrWMFt
If y’all could help me out here, I’d sure appreciate it. I’ve been having a ROUGH time getting up to speed with Linux/ROS/Dobot, as a generally computer-illiterate person haha. Thanks in advance!