Hi!
I need a simple pick and place program for Dobot MG400.
But pick point (P1) and place point (P2) I need to get manually.
I thought about using the UNLOCK button (on the dobot’s arm) but when I run the program I can’t unlock dobots arm.
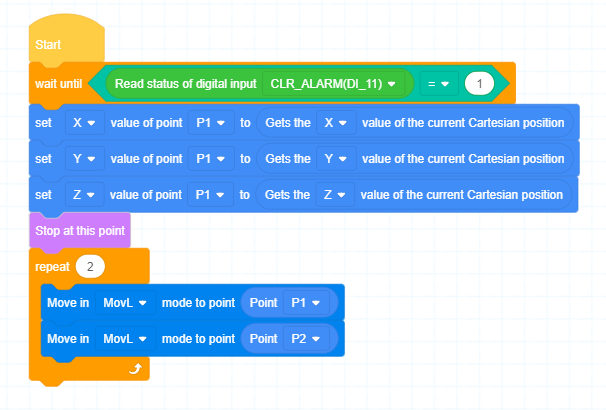
I made a simple program (below).
- first I unlock arm and set manually the pick point P1.
- next I run the program and press the button on DI_11.
- next program gets coordinates X,Y,Z for pick point P1.
Now the dobot arm goes from P1 point to P2.
And the problem is how to show manually P2 point? When I run the program I can’t unlock dobot’s arm.