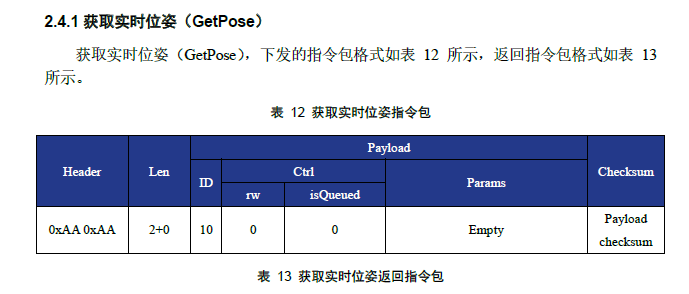
初次接触dobot,想用自己的Arduino yun来控制magician,但是看通讯协议不是很清楚,看demo也不明白,是否能给个具体的例子,比如发送执行回零指令,

我是要这么发送:??
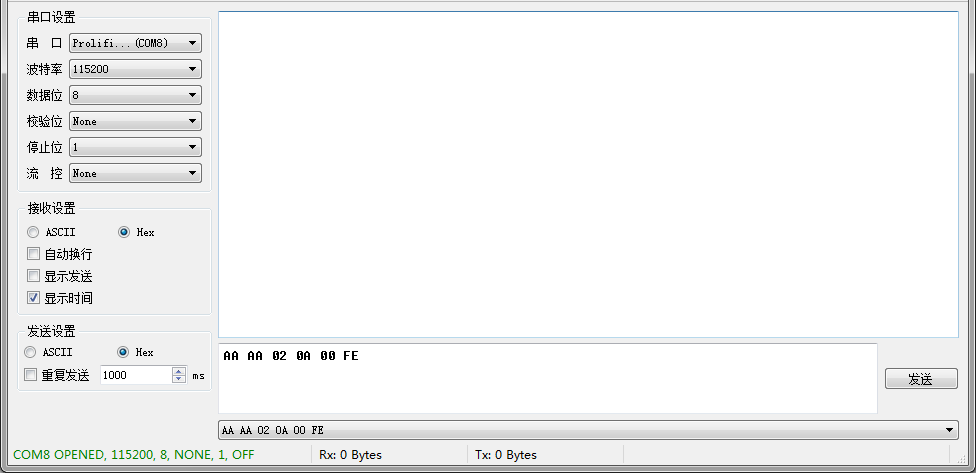
Serial.write(0xAA); // header1
Serial.write(0xAA); // header2
Serial.write(3); // payload length
Serial.write(31); // ID
Serial.write(1); // rw
Serial.write(1); // isQueued
Serial.write(0x00); // params(这里是uint_32t的,发4个?,发什么内容?)
Serial.write(-3); // payload checksum
求指教