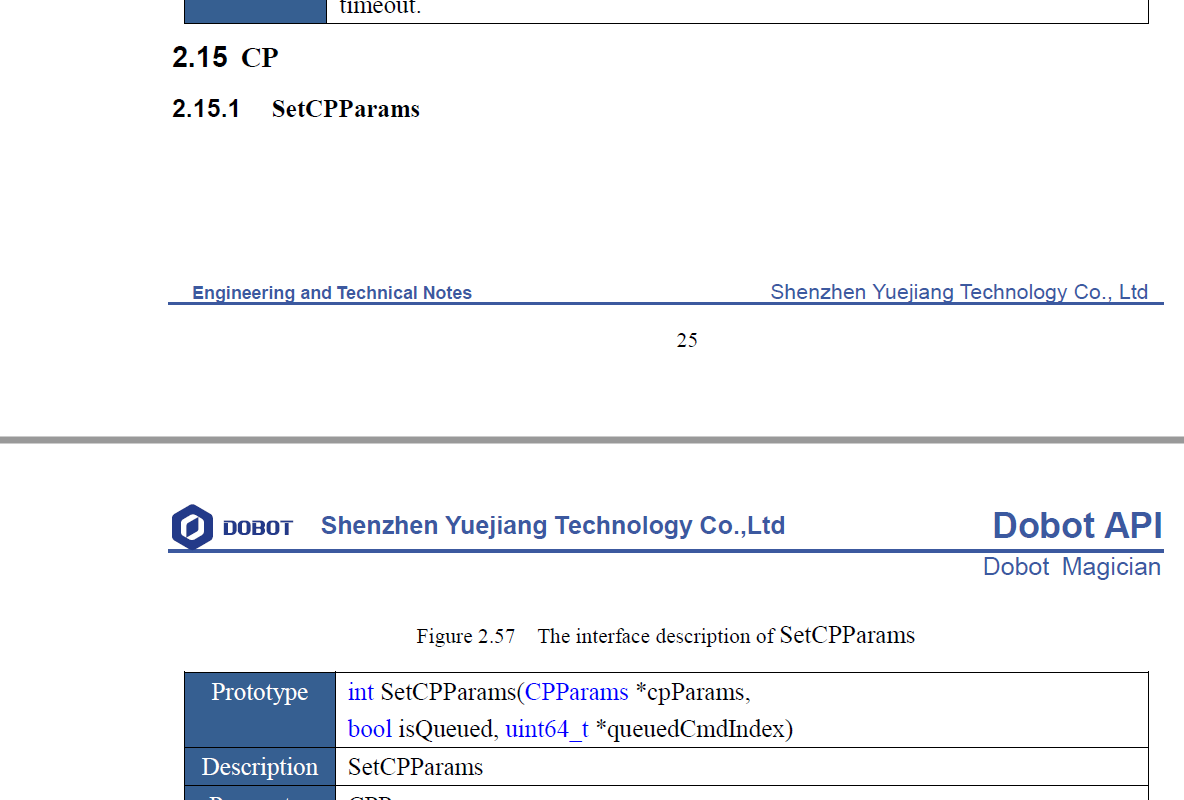
Hey Eric, I passed these value in CPParams
CPParams cpParams;
cpParams.acc = 200;
cpParams.juncitionVel = 200;
cpParams.period = 100; // for nice smoothness
cpParams.realTimeTrack = false;
SetCPParams(&cpParams, false, NULL);
and these in CPCmd
void moveCP(float x, float y, float z, float r)
{
CPCmd cpCmd;
cpCmd.cpMode = CPAbsoluteMode;
cpCmd.velocity = 200;
cpCmd.x = x;
cpCmd.y = y;
cpCmd.z = z;
SetCPCmd(&cpCmd, true, NULL);
}
and passing these coordinates to move on
void MainWindow::on_cpButton_clicked()
{
moveCP(210,70,0,0);
moveCP(300,100,50,0);
moveCP(200,150,15,0);
moveCP(150,200,15,0);
moveCP(200,150,15,0);
}
it move smoothly but when i insert more coordinates sometime it take little pause between one point to other. is there any other value I should pass in CPParams or CPCmd ?