
Hi, I’m using Dobot Magician with ros kinetic and I have found ROS Moveit Package in CSDN website.
I have execute roslaunch ‘moveit_planning_execution.launch’ and there are erros below :
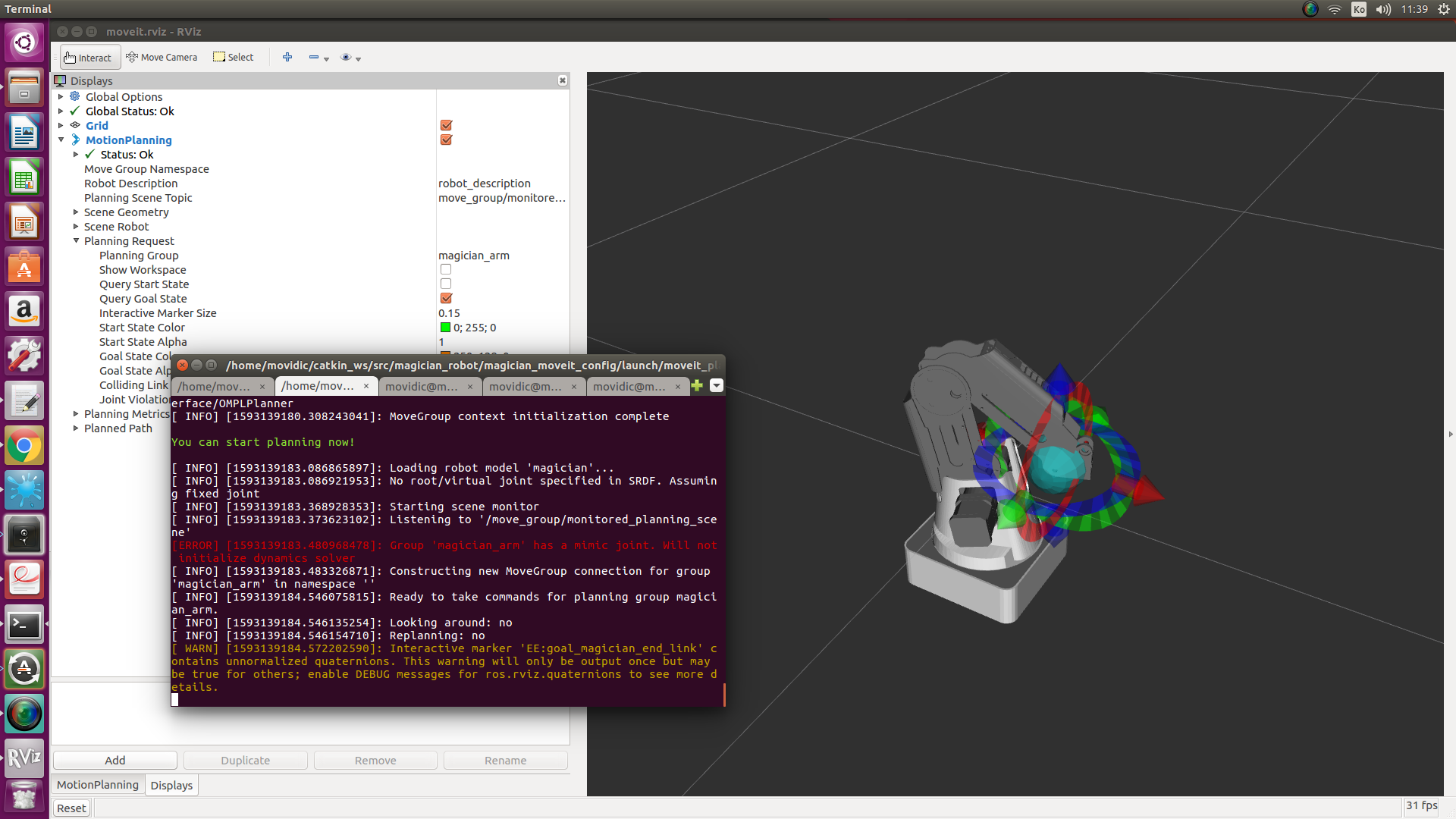
- No root/virtual joint specified in SRDF. Assuming fixed joint
- Group ‘magician_arm’ has a mimic joint. Will not initialize dynamics solver
I want to solve these errors. Can I edit URDF file?