Hi everybody,
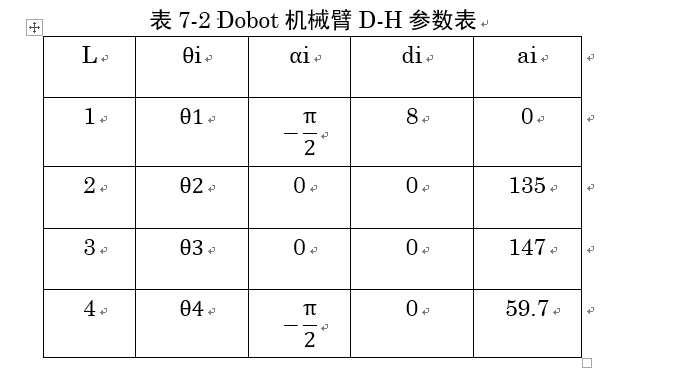
i want to do kinematic analysis for the dobot magicain geometrically. with the conventional way, it is not possible to find the inverse kinematics, becuase j3 =0 when last link becomes parellel to the Dobot base. so its becoming difficult to solve using geometrical method, ecuase conventional way is using j3 angle reference to the first link.
please help me out for to do this and kindly provide the kinematics structure of the Dobot magicain
Any help is appreciated