
I bought a Keyence Vision System and now I am trying to set up communication between Dobot M1 and the Vision System using TCP/IP in Blockly mode. Here is what I have so far 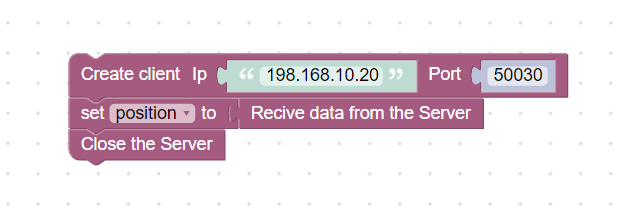
I am planning to make the robot a client and the camera a server. Does the above look right? Also does anyone have any experience with how to do this?
Dobot M1 TCP/IP Communication With a Vision System
alex_boiko
#1