
I am programming M1 for a high speed application.
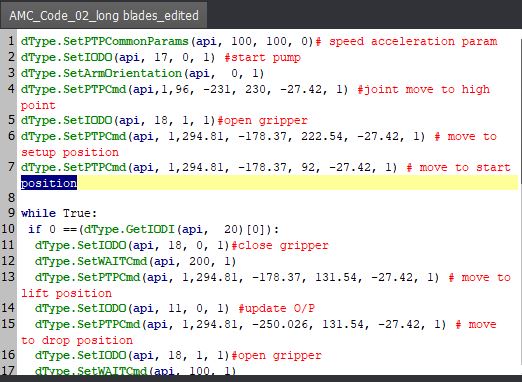
Im using PTP command and have set common PTP parameter for speed.
Im getting full speed of the M1 for z axis.
But M1 moves very slowly on the X and Y axis
Is there any programming issue.
What would be fastest PTP command for M1.