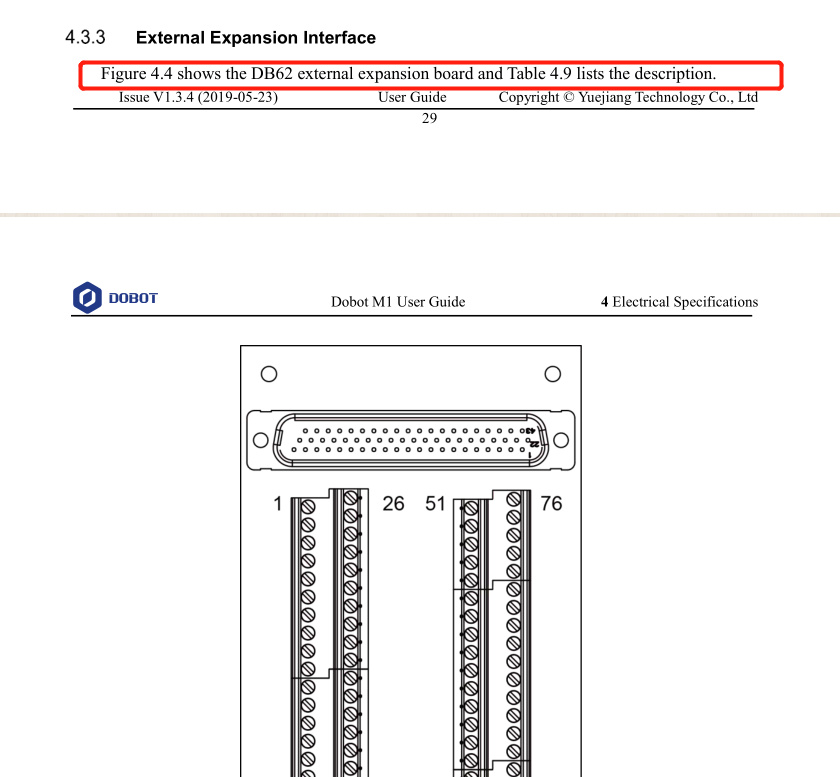
Hi Daniel, thanks for replying. I think there might still be a little miscommunication on this. The above reference in section 4.3.3 does give a pinout but that is for the expansion board with the 100 pin terminal blocks and 2 relays. You need to connect that expansion board to the back of the robot in order to use it.
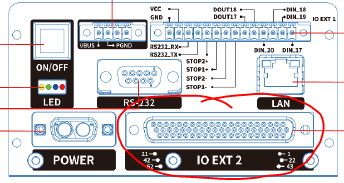
I do not have the expansion board and wanted to make a custom DB62 connector interface. For example, how can pin 90 on page 35 be DIN8 when there are only 62 pins on the back connector? Do you have any documentation of the pinout of the back of the robot DB62 connector or at least a net list of the expansion board I can look at?