Hi,
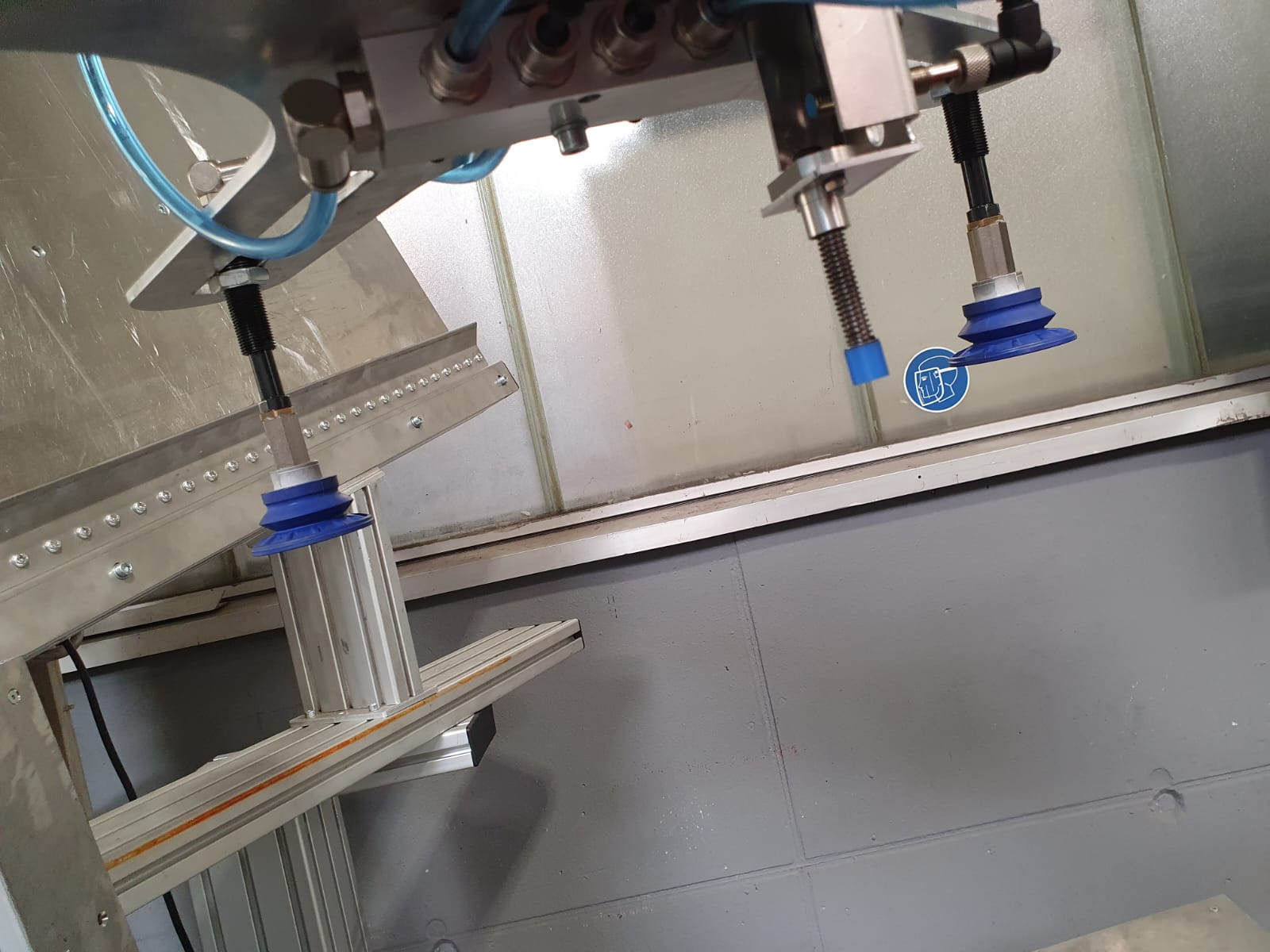
we use an CR10 for loading sheet metal. Currently we are manually learning the maximum height of the stack and overriding the suction point. In our program we offset the point after each part by the thickness of the sheet metal.
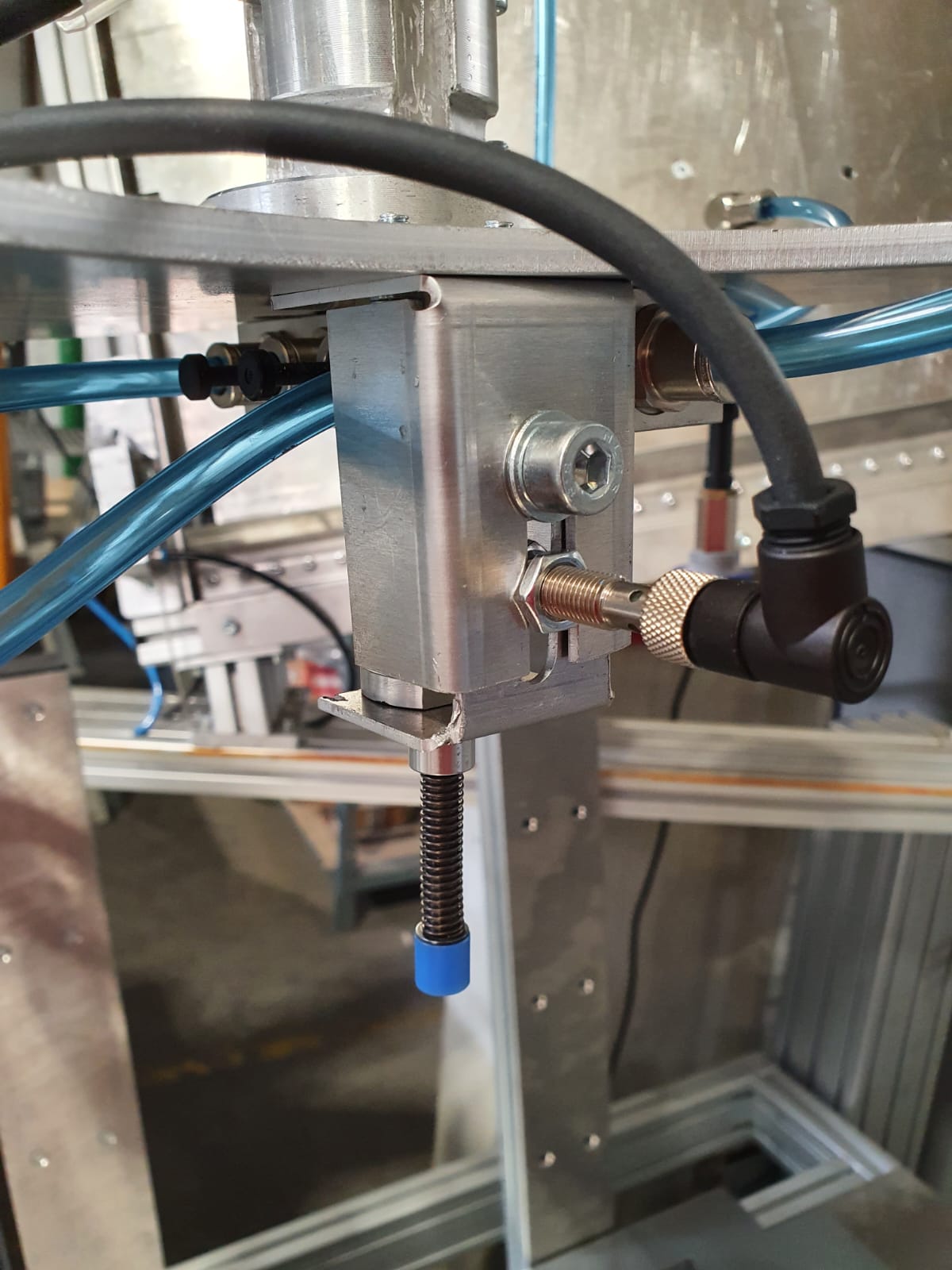
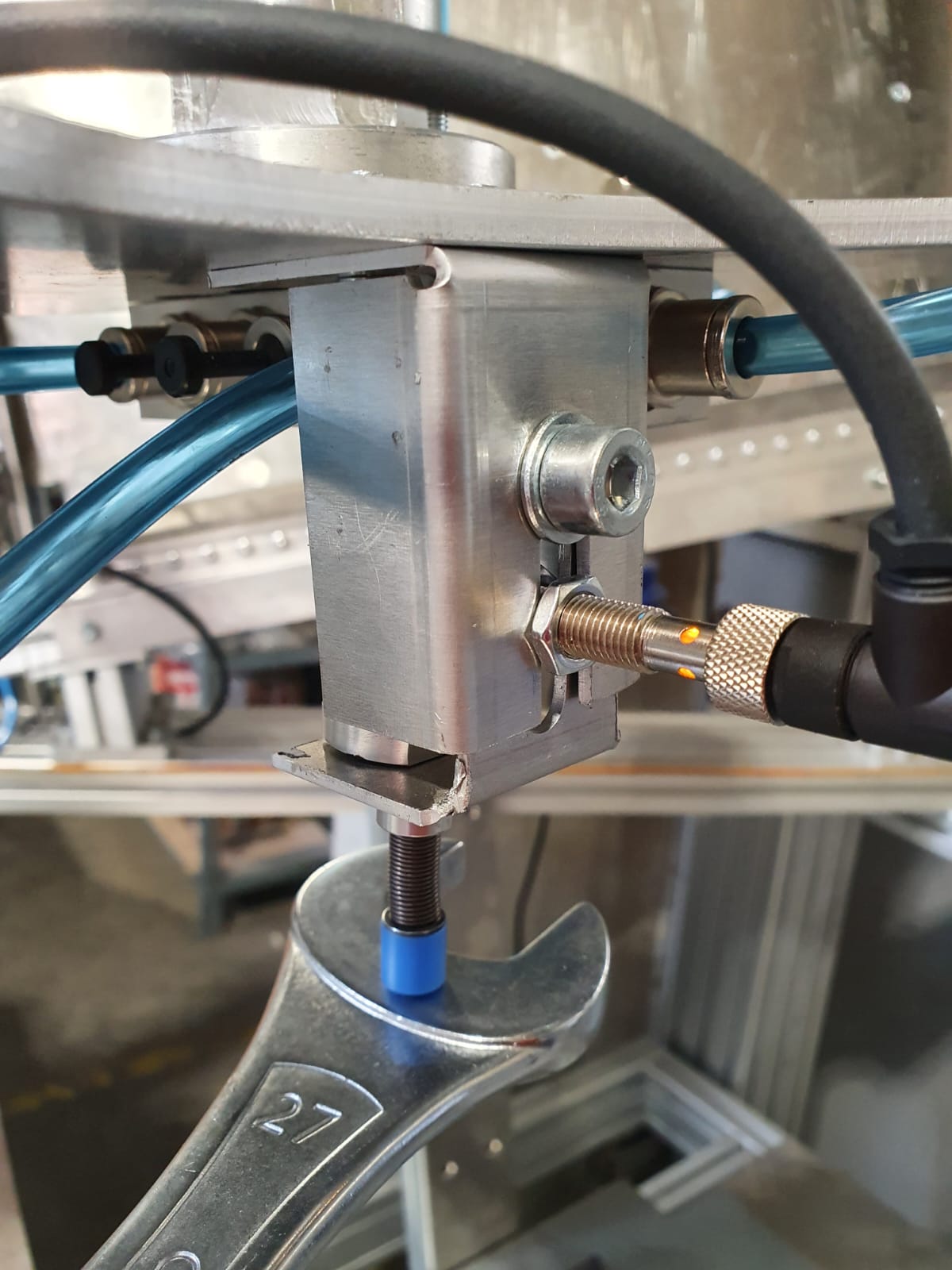
We want to determine the height of a stacked item using a sensor, which is located on the vacuum gripper, and then tell the DOBOT at what height it can pick up the parts. Which command can be used for this?
Thanks in advanced