
Hi, I’ve set up the M1 to operate using a separate python script. I am having issues with using the HOME functions in my script. Can anyone help me with homing the dobot without using M1 Studio. Or is there a way to see what I should pass into SetHOMECmd() in order to use the command in python
Connecting M1 through python
Daniel.Deng
#2
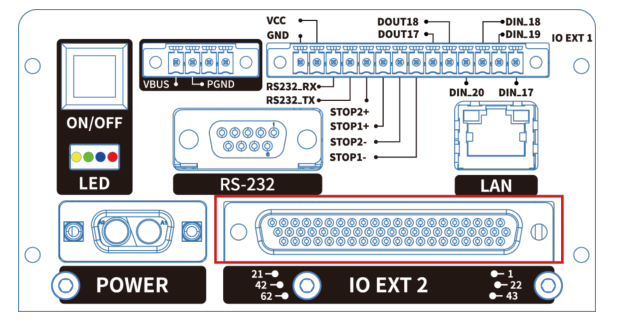
There is no need to use the HOME command, but if you want to use the offline function without using m1studio, I can recommend it to you.You need a db62 expansion board, connected to the chassis of m1, like this.
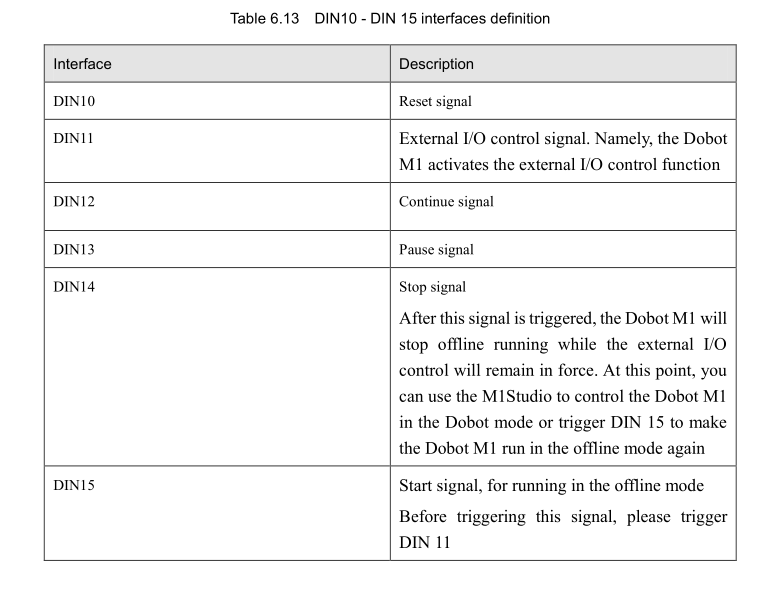
After triggering in11, other signals can be used. Including reset signal, stop signal, start signal, etc.
best regards!
chris
#3
I do need the HOME CMD, the robot must go home in order to reliably execute my script. I don’t need to connect offline using the expansion board since its already connected using my python script. How do I execute the SetHOMECmd(), when I try the robot throws an error and needs rebooting.
Chris147
#4
Hi,
i have the same Problem with C#. I have found out, that the SetHOMECmd() command only set the current pose as coordinates 400,0,0,0. The Robot does not move or something else. I think it’s an failure in the Dll. The function is defined in the DobotDllM1.dll, but it doesn’t work correct.
@chris (same name lol) have you found a solution?
lah
#5
Hello, would anybody be so kind to post a working python script on how to connect to Dobot M1 and to perform basic moves. I just received my brand new Dobot M1 and I am struggling with it. I was working before with Dobot magician.
I would also need all the dll’s and *.py scripts that I have to import.
Best regards from covid-19 affected Slovenia
Igor Lah