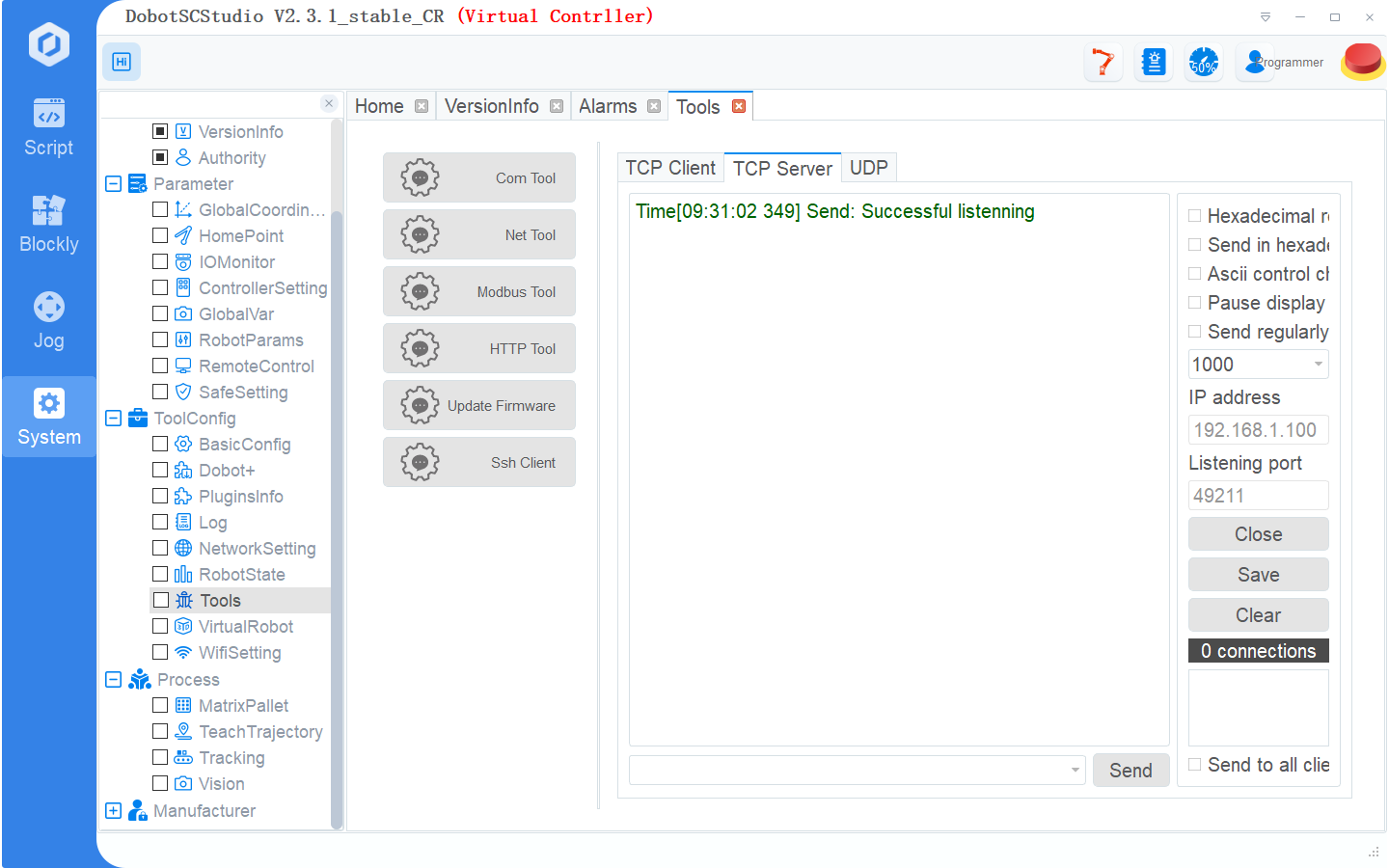
I, did the following:
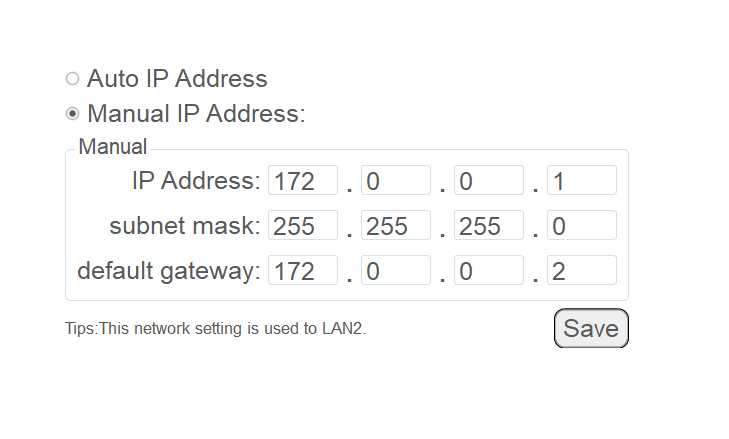
it doesn’t work

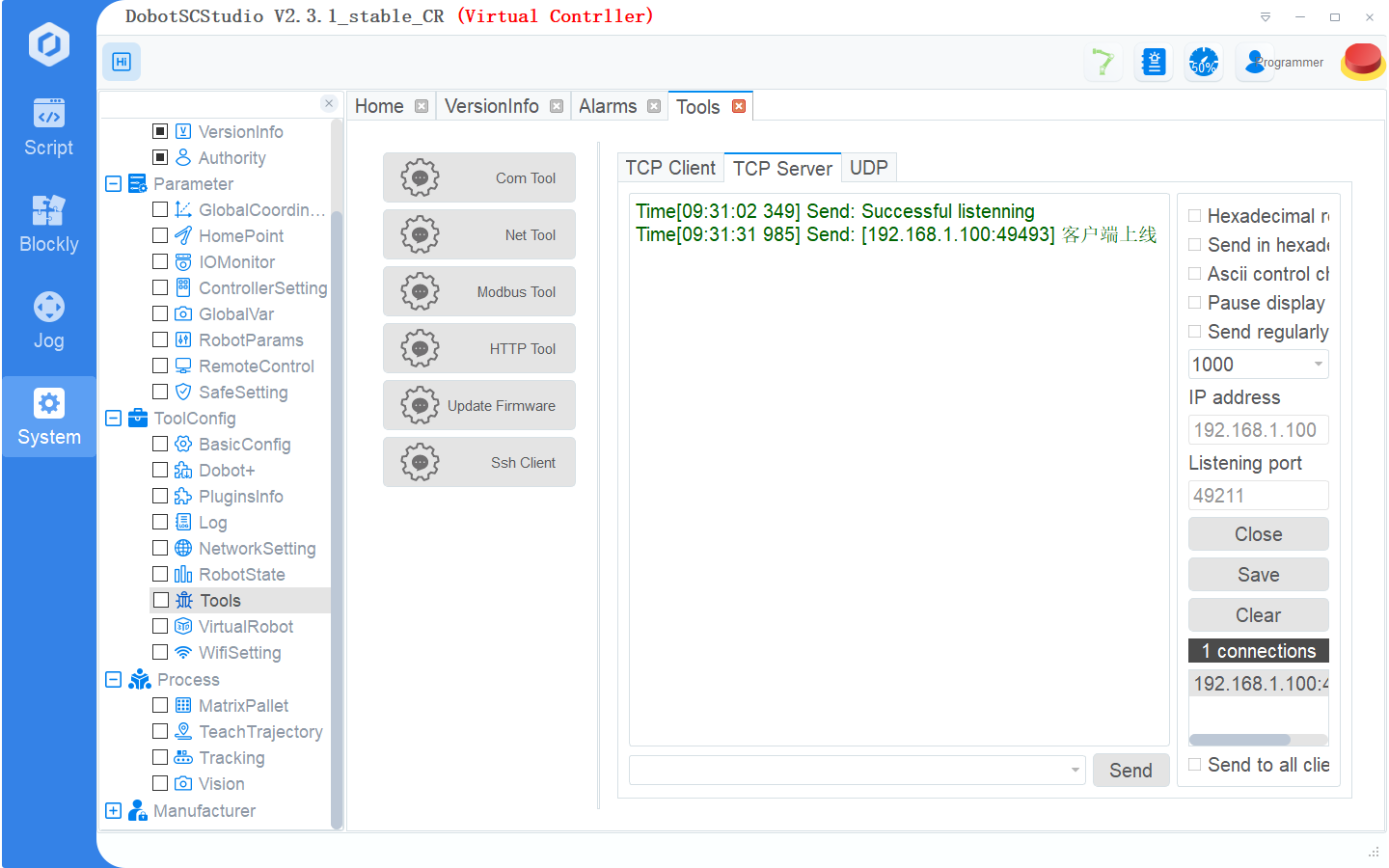
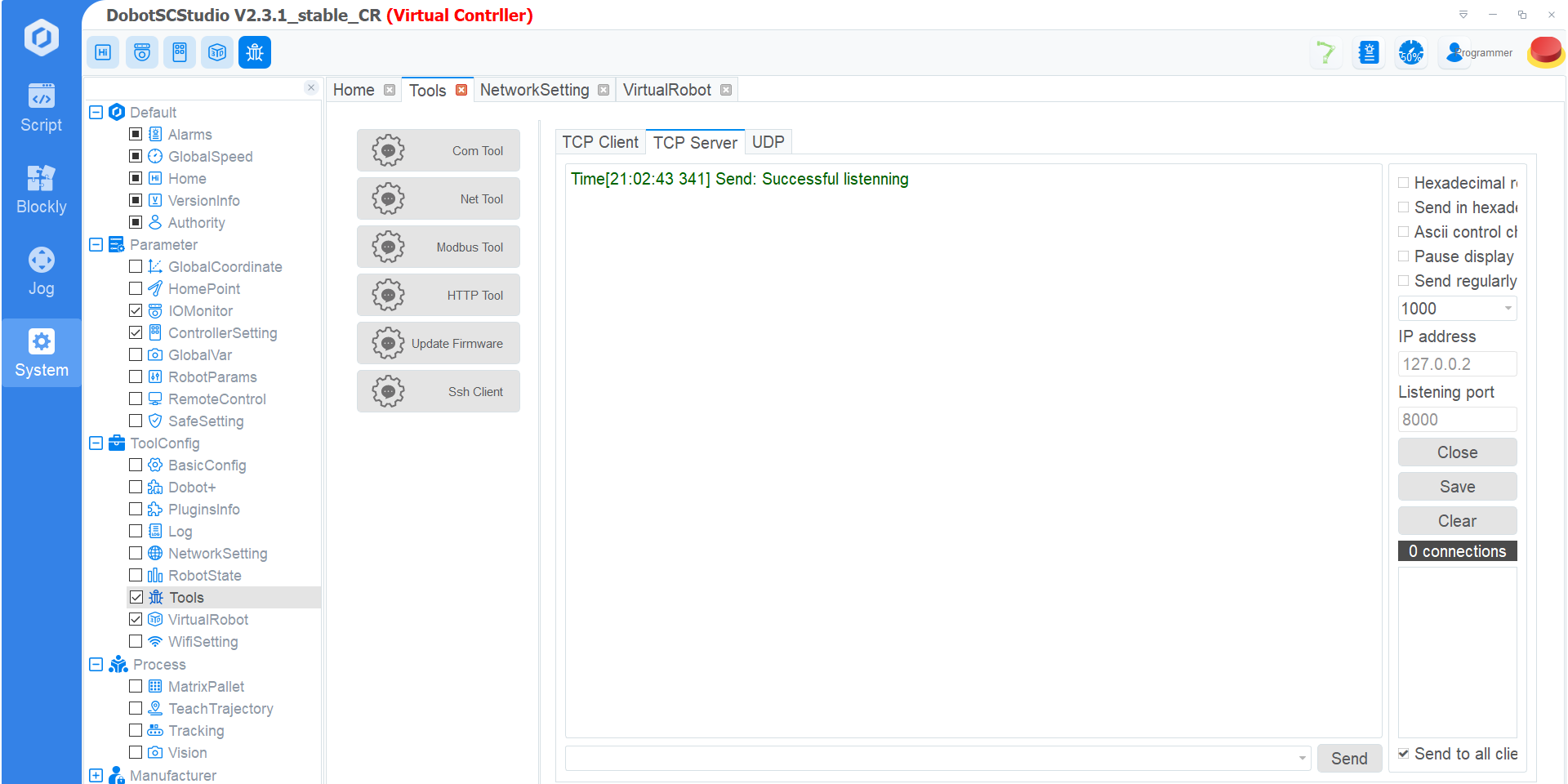
I managed to get in touch.
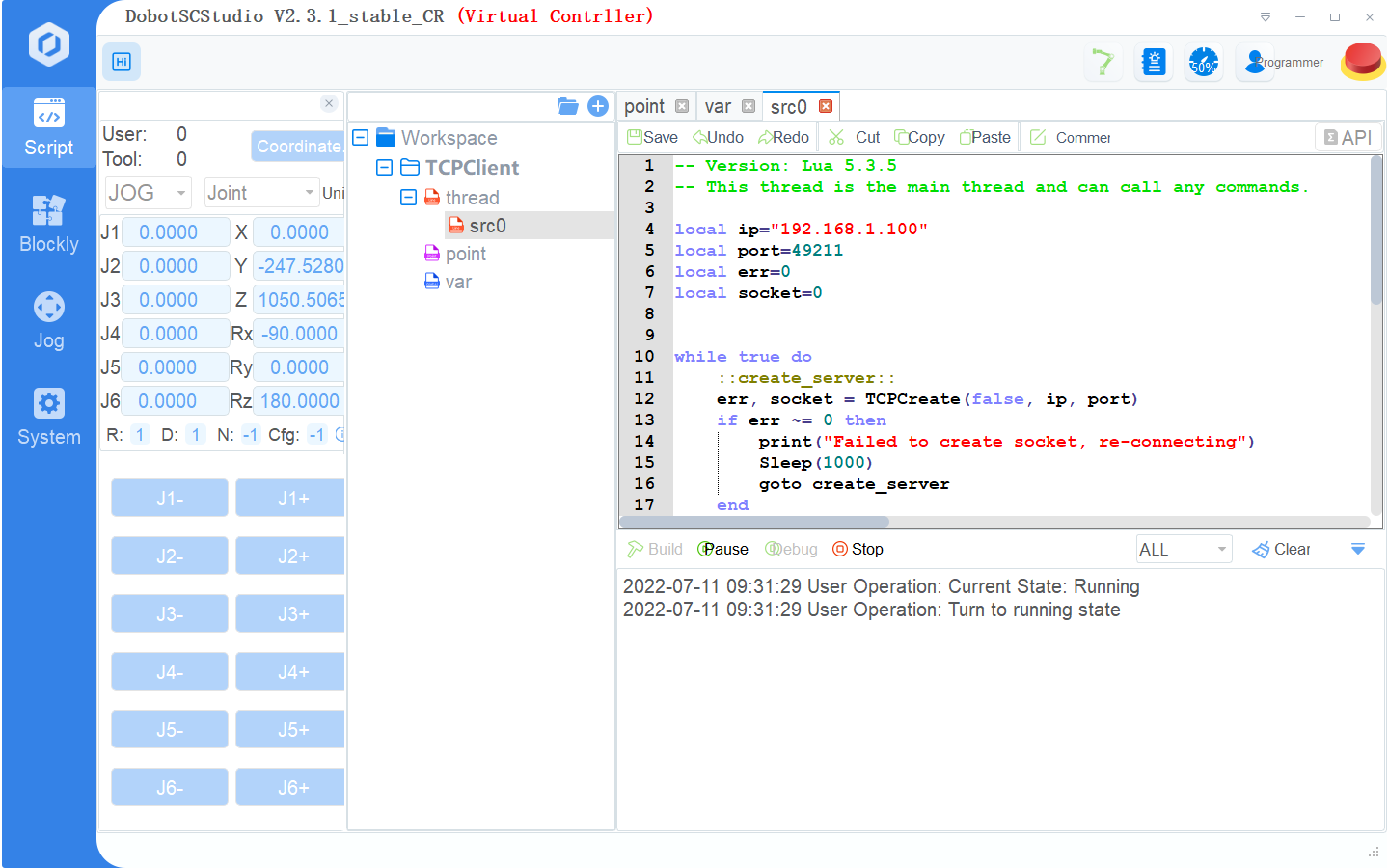
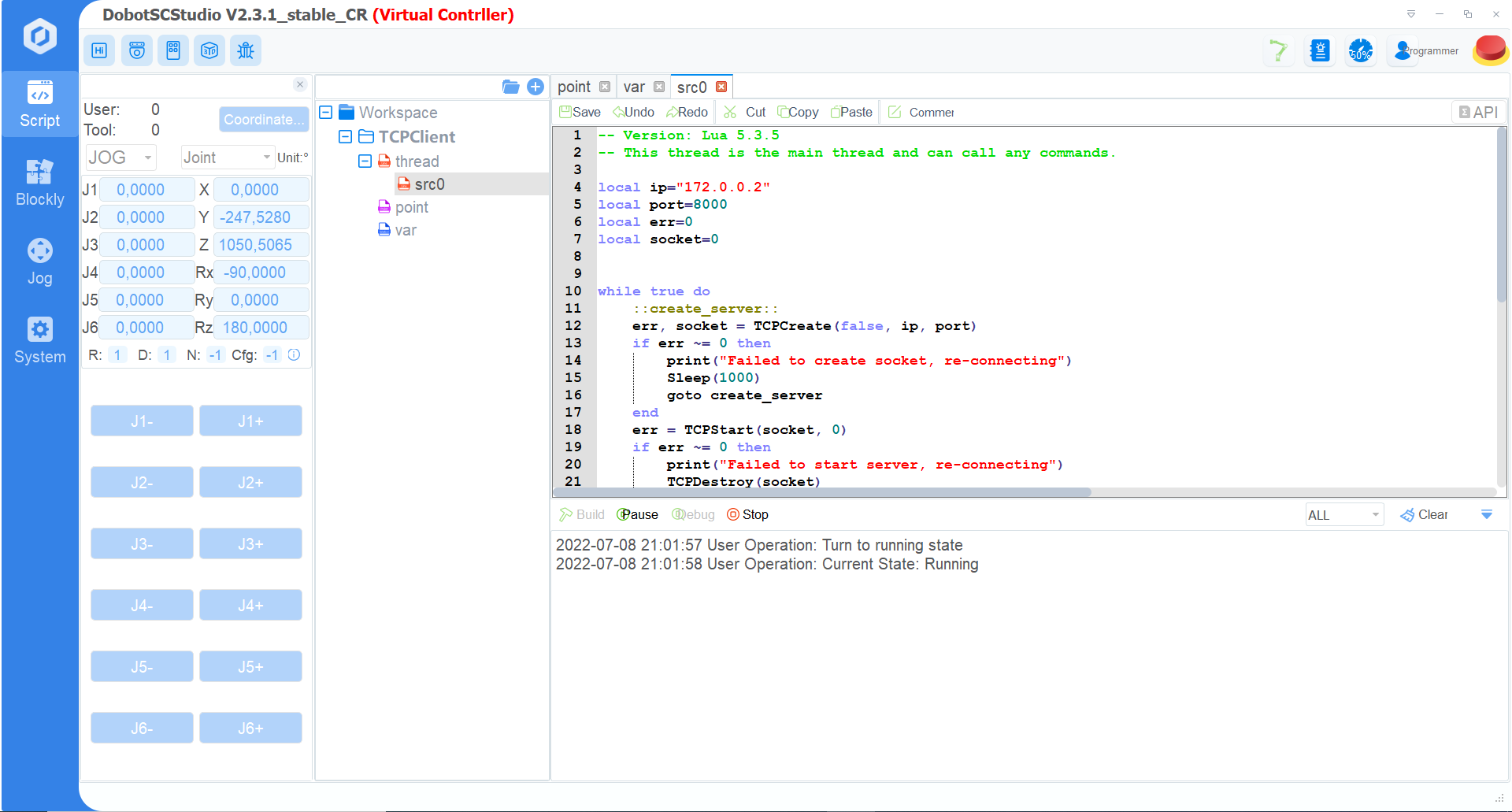
I took an example: TCPClient_MultiThread
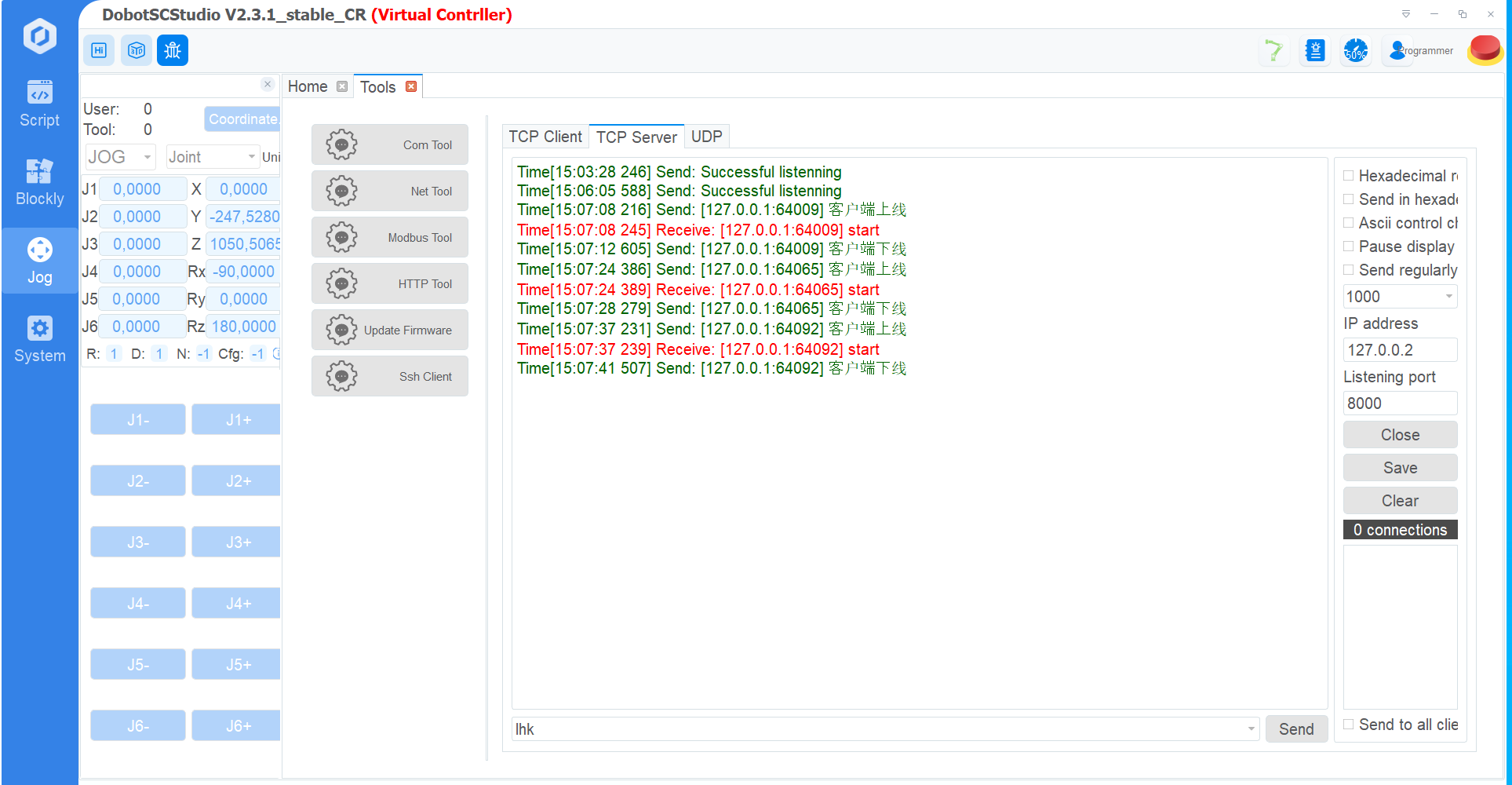
In it I changed the IP to “127.0.0.2”
local socket = 0
local err = 0
local ip = "127.0.0.2"
local tcpData = nil
while true do
::create_server::
err, socket = TCPCreate(false, ip, 8000)
if err ~= 0 then
print("Failed to create socket, re-connecting")
Sleep(1000)
goto create_server
end
err = TCPStart(socket, 0)
if err ~= 0 then
print("Failed to start server, re-connecting")
TCPDestroy(socket)
Sleep(1000)
goto create_server
end
TCPWrite(socket,"start")
while true do
err, tcpData = TCPRead(socket,0)
if err ~= 0 then
print("Failed to read data, re-connecting")
TCPDestroy(socket)
Sleep(1000)
break
end
positionCmd =tcpData.buf
end
end