
感谢您浏览、回答本问题。
我们在使用arduino (arduino MEGA 2560),来进行对DOBOT magician的控制。由于代码的问题,机械臂对命令的执行有一定的卡顿现象。我用DOBOT magician为arduino的DEMO进行举例。
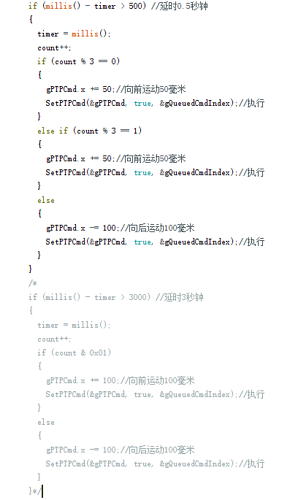
注释中为未修改过的DEMO,控制机械臂前后移动,延时3秒钟。代码为修改过的DEMO,把原版DEMO中的向前移动的100毫米分成两个向前移动50毫米。但是当我们把延时时间(500毫秒那个)无论调的多短,两个向前移动50毫米的命令执行中间都会有0.5秒左右的停滞状态。
这与我们的预想情况有一定的不同之处,当延时时间比较短的时候在机械臂执行第一条向前运动50毫米的命令时(即此时count%3==0),我们对目的地的坐标进行修改,而且是同一方向,应该可以没有卡顿。但是实际上并不是这样。
这是否与队列命令有关?这个问题又应该如何解决呢?