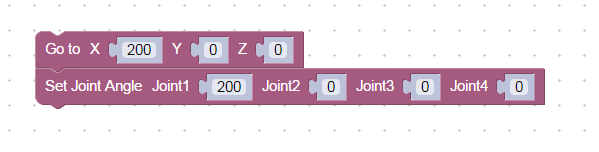
Is there a way to specify what angle I want a joint to move to, the same way you can do it for XYZ coordinates?
e.g for XYZ in pyhton it is:
dll.SetPlaybackBufferCmd.argtypes = [POINTER(PlaybackBufferCmd)]
playbackCmd = PlaybackBufferCmd()
playbackCmd.x = 250
dll.SetPlaybackBufferCmd(byref(playbackCmd))
How do I do this for joints? something like:
playbackCmd.joint1Angle = 45
???
Thanks!