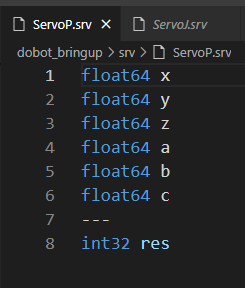
你好,x y z的单位是毫米。 abc的单位是 度(°)
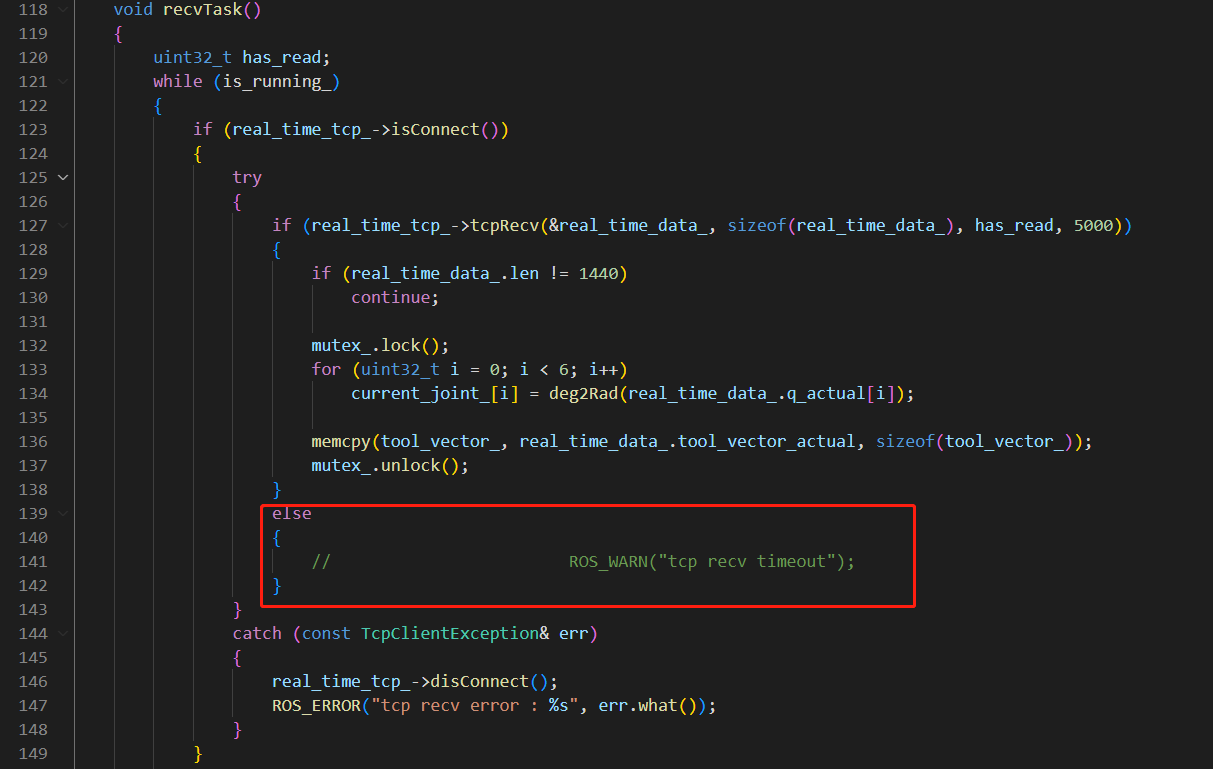
好的谢谢,还有个问题就是在ROS中由于TCP超时无法获取真实机械臂的实时位姿,导致无法使用moveit,有个警告打印被注释掉了,不清楚这是啥原因