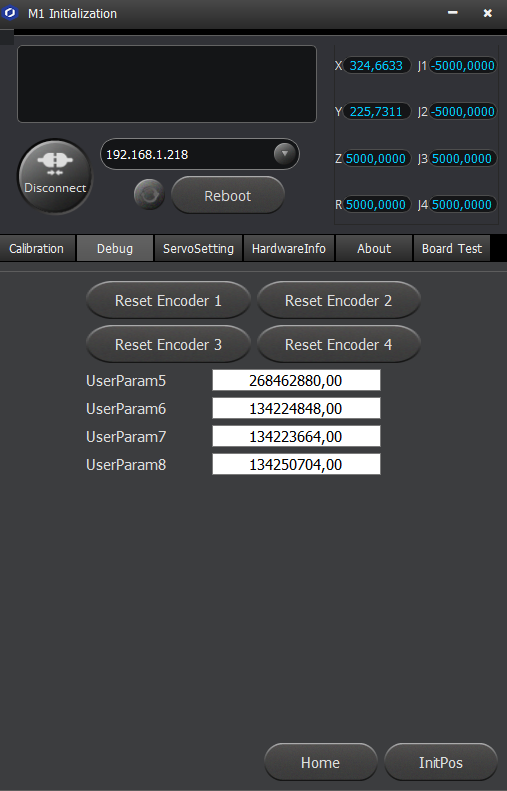
When I connect to my Dobot M1 only the encoder of the Z axis shows a normal value and is able to move. The other encoders always read -5000,0000.
The software tells me my J1, J2 and J3 are in their limits and I have to move them ‘into the other direction’ to clear the errors. I can only move them in one direction using the software, but as the sensor value doesn’t change (it stays at -5000.000) it will never clear the error.
Running the old initialization.exe and resetting the encoders doesn’t do anything.
The encoder battery is tested and OK.
What do I do?
To add some more information on how I try to setup the M1:
By hand I moved the arm so it is straight, then turned on power and connected in DobotStudio2020 (the M1 is running the updated firmware).
Right after connecting I get these errors:
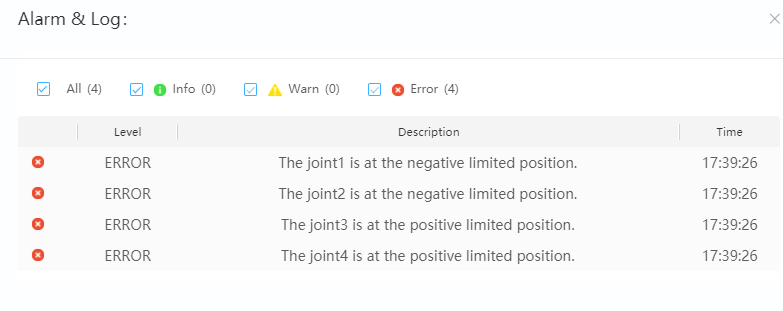
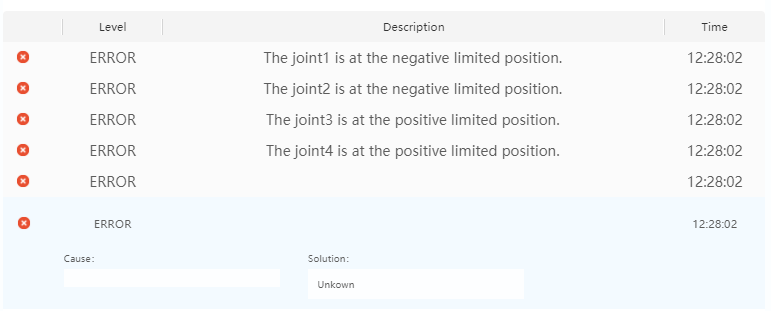
I clear the alarms (but they don’t go away) and run homing. When the arm hits its limit it stops and moves back a little, as expected. But I see a popup error saying ERR_OTHER_AXIS4_FOLLOW. The manual doesn’t describe what this error means. When I go to the error list in the DobotStudio2020 it doesn’t show any content for this error (see the last error in this screenshot:):
![]()
How do I get the software to read the encoders properly? I checked the cables and everything seems to be in order (I never touched the cable since getting the Dobot).
Some screenshots with all version info: