Hey all! So I’ve had my Dobot for about 2 or 3 months now and I’ve noticed that I constantly have the same problem: the xyz reference frame from which the robot measures its position seems to move every time I restart it.
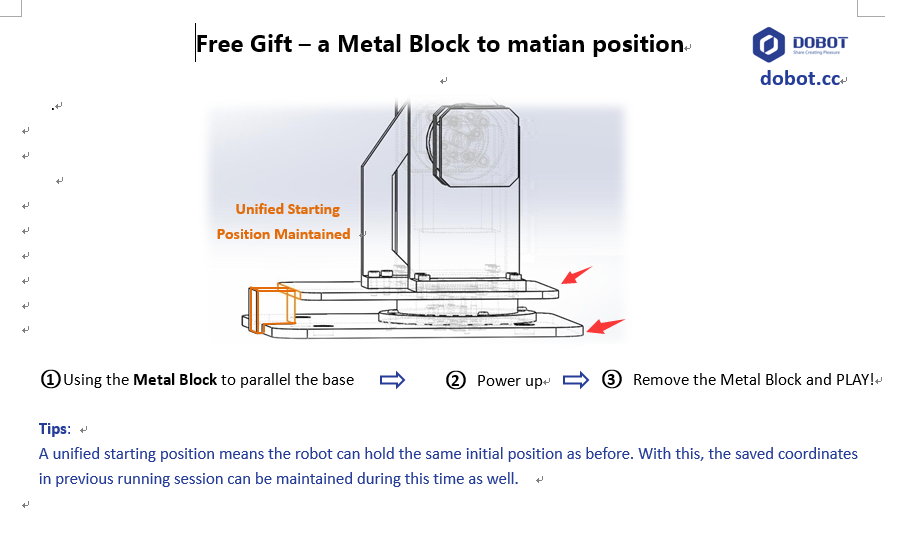
Right now, I have the Dobot set up in the recommended configuration (with joint 2 reading greater than 45 degrees and joint 3 reading less than 45 degrees and the suction head located at a point along the x-axis of the robot). I’ve drawn a circle on a piece of paper that the robot always starts and ends on. This location is (300.2, 0, 27.1) in mm. However, I’ve noticed that when I turn it off at the end of the day and start it up in the morning, its reference coordinates seem to shift slightly so that when I tell it to go to (300.2, 0, 27.1), it lands about 1 mm in the positive y direction and 1 mm in the positive x direction off of (300.2, 0, 27.1). This is extremely frustrating because the process I am instructing it to perform requires a high level of accuracy, so every time I restart the Dobot I have to overwrite the locations I told it to go to yesterday to its new (and incorrect) perception of where those locations are. For example, if I told it to go into a container at (55.4, 183, 15) on Tuesday, when I come back on Wednesday, to get it to go into the same container I now have to tell it to go to something like (56.4, 183.8, 15). Everything is in a fixture that forces all of my components to be a fixed distance from each other, so containers and the robot base moving around should not be the problem.
Sorry for the long explanation, it’s a very specific problem. Is the Dobot just incapable of holding the ~1 mm precision that I need on startup? I’m using the Dobot V1.0, if that helps.