
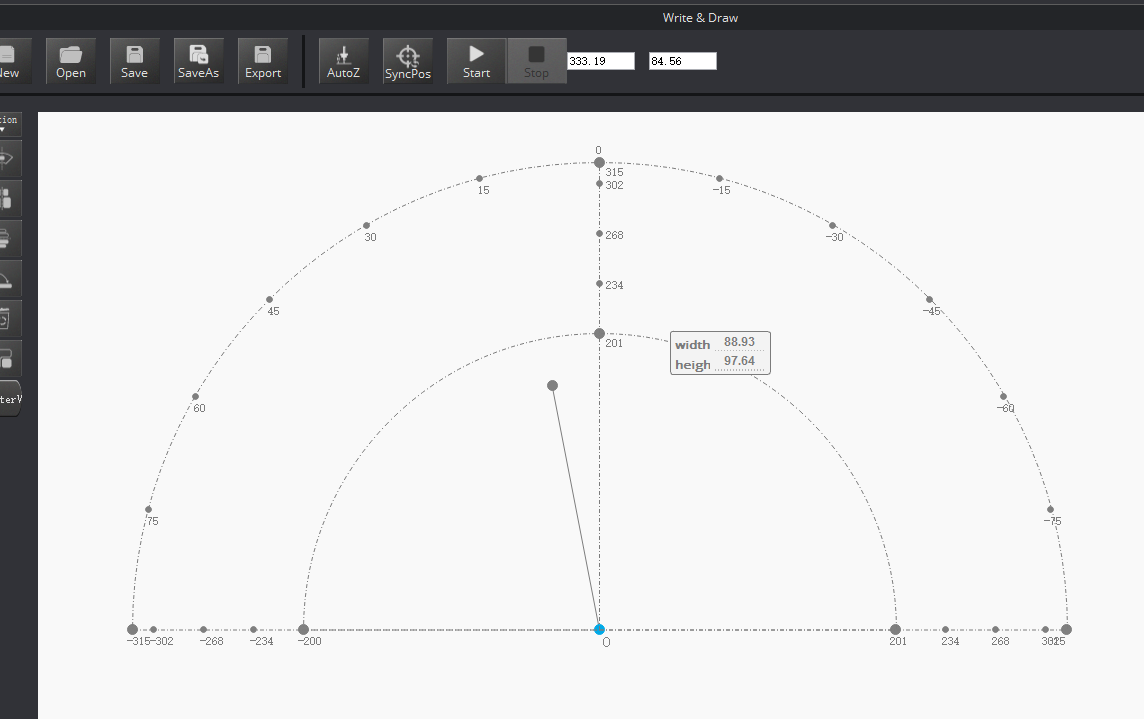
R axis is not supported under CP mode. And Dobot can not move to those points you listed above, they are in the limited position. For the working range, you can refer to the annular zone of the write&draw map here:
Dobot Magician taking pause when moving between two points
Eric.Zhou
#13
Thanks for the answer. But i need to move R also for tracking real life things. So what is the alternate solution for my problem ?
Eric.Zhou
#15
I think you need to insert a PTP command to control R axis after the CP command is over.
will you please tell me what is the range of x,y and z for cp command, I inserted 0, 50, 70, 100 for x and same for y but it got stuck
Eric.Zhou
#18
As the picture shows, about 170 to 315mm. Also you can move dobot around and check which point is available here:
Hey Eric, I passed these value in CPParams
CPParams cpParams;
cpParams.acc = 200;
cpParams.juncitionVel = 200;
cpParams.period = 100; // for nice smoothness
cpParams.realTimeTrack = false;
SetCPParams(&cpParams, false, NULL);
and these in CPCmd
void moveCP(float x, float y, float z, float r)
{
CPCmd cpCmd;
cpCmd.cpMode = CPAbsoluteMode;
cpCmd.velocity = 200;
cpCmd.x = x;
cpCmd.y = y;
cpCmd.z = z;
SetCPCmd(&cpCmd, true, NULL);
}
and passing these coordinates to move on
void MainWindow::on_cpButton_clicked()
{
moveCP(210,70,0,0);
moveCP(300,100,50,0);
moveCP(200,150,15,0);
moveCP(150,200,15,0);
moveCP(200,150,15,0);
}
it move smoothly but when i insert more coordinates sometime it take little pause between one point to other. is there any other value I should pass in CPParams or CPCmd ?
Using CPCmd and PTPCmd for axis and Gripper movement in dobot magician problem
Hi Eric, Issue is still there, sometime its move smoothly and sometime got stuck, i dont know why, I set all CPParams value and it worked fine but now it still taking pause. is there any other way to control it ??
liuzhufu
#22
If you don’t send CP command quickly enough, then the Dobot controller may think there are no commands, and starts to deaccelerate. The queued command buffer length is 32, so in fact you can do in this way,
SetQueuedCmdStopExec();
moveCP();
moveCP();
moveCP();
moveCP();
...
SetQueuedCmdStartExec();
moveCP();
moveCP();
moveCP();
That is to say, you can send some command before start the command execution.
Thanks Eric, You helped a lot now its completely working. Thanks again. Now going to solve gripper ® issue.
fyi Eric, using this
SetQueuedCmdStopExec();
moveCP();
moveCP();
moveCP();
moveCP();
…
SetQueuedCmdStartExec();
moveCP();
moveCP();
moveCP();
both CPcmd and PTPcmd are working great 
Thanks Liuzhufu, I have another problem, I am tryning to run ptp command but gripper rotating 360 degree and I am passing only 30 degree movePTP(0,30,35,30); and doesnt stop also, please help me on this
I am trying to use PTPCmd with CPCmd. CPCmd is for moving one coordinate to other and PTPCmd is for gripper.
but i need smooth motion as i posted above but when I am doing same, it take little pause (when its complete CPCmdit goes for PTPCmd and I am paasing same coordinate) for coordinates check or movement. code is like this
moveCP(206,0,135);
movePTP(206,0,135,40);
moveCP(275,0,147);
movePTP(275,0,147,35);
liuzhufu
#27
CPCmd doesn’t support the axis control. And When encountered with PTPCmd, CPCmd always deaccelerate to speed zero before the PTPCmd. And if you would like to control the gripper, you can use SetEndEffectorGripper instead of PTPCmd.
Hi Liuzhufu, can I pass degree (-90 to 90) for gripper using SetEndEffectorGripper. becuase i need to move it at perticular degree on a perticular coordinate
liuzhufu
#29
Hi,
We have collected enough customized requirements for algorithms and APIs, and we will realize this one as soon as we return to work after the traditional Chinese New Year. It would be realized in this way, CPCmd itself will contains the control of the forth axis(the rotating control). It’s that OK?
Yes I think so if CPCmd will contain control for fourth axis (controlling gripper) it will be lot easier to work on.