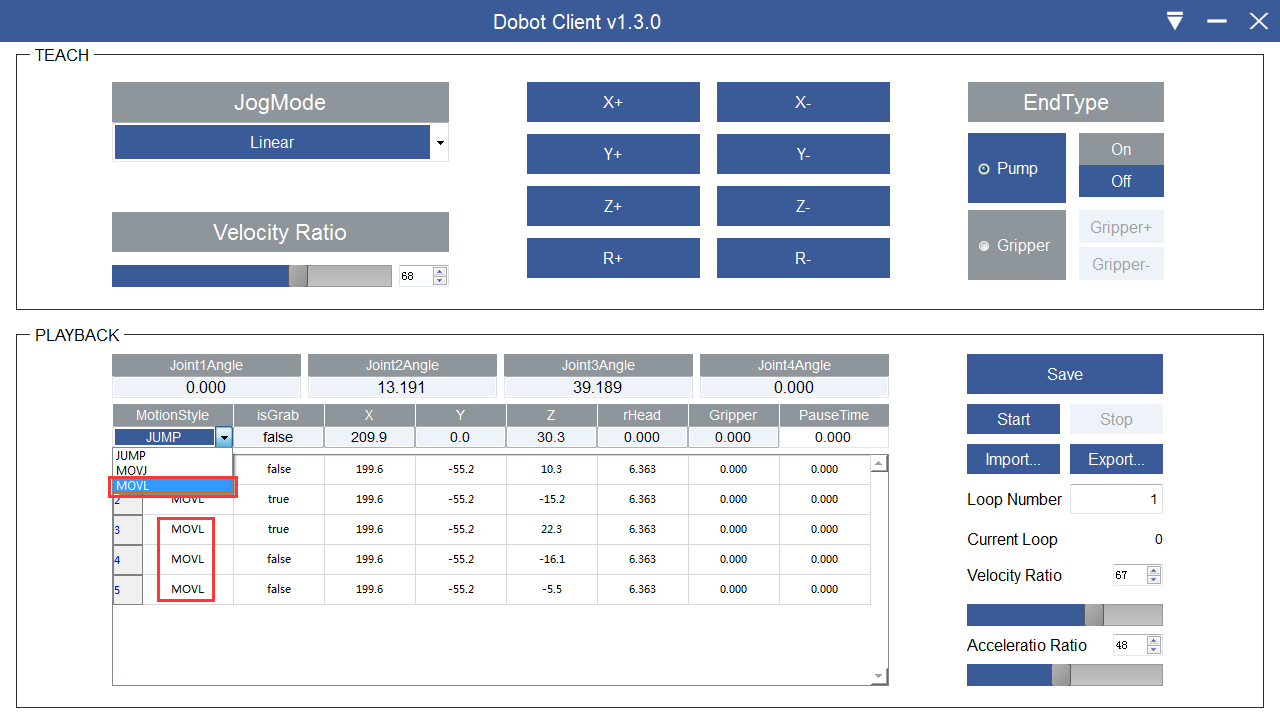
I teach my Dobot by setting X, Y, Z settings saving each to a row in teach matrix.
Upon playback after every command row
I get a 10mm -Z movement (the bow)
which I have NOT programmed in

What is this? Can it be fixed? How?
Dobottools_v1.1.0_20160315 DobotClient
latest Dobot firmware