
I am having trouble activating the gripper servos via the IDE program (1.6.0 - as 1.6.9 had many problems)) for correct Arduino (2560). Motor axis all work fine however grippers show no sign of life for either servo. I refer to the tutorial document DobotApplication_V1.0.1 _en _updated, fig 2.8. It specifically states the white is the ground for both connectors and the diagram shows the white wire on the left of the connector in the diagram which is the way I connected it however the Dobot PC board labels both inputs with the Gnd on the right (relative to the same diagram). Is the printing on the PC board just wrong or misleading? If this is the case and I have connected it correctly I am seeking reasons for the lack of gripper control. There is no Servo library in your sample codes and yet the motors work. If I use the library there are no specific pins to use so that is not the solution. I have change the demo code supplied for each joint and each test fine but 11 and 12 for the gripper have no effect. Any suggestions?
Arduino Gripper and servo
Eric.Zhou
#2
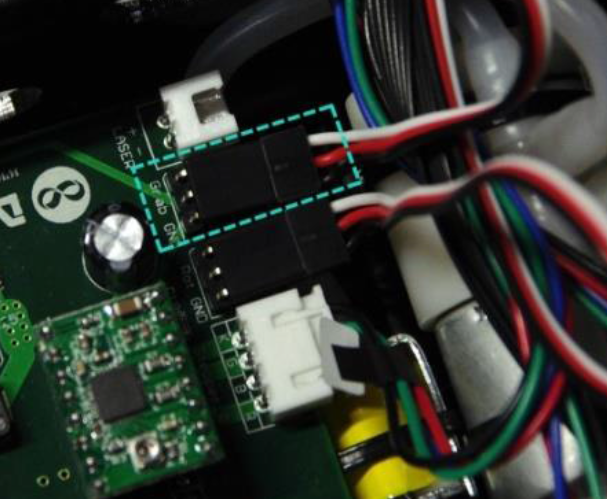
The label on the board is correct, and the wiring is correct too, white on the left and black on the right. The states of the diagram is wrong. You just need to connect them as follows:
Eric.Zhou
#4
sorry, my bad! I mean the notice in the diagram is wrong, the white one is the grab signal and the black one is the GND.
welldone
#5
I have the same problem,
I cann’t activated suction cup using file on demo_magician_arduino, there is no example how to call that function.
I tried following instruction but no avail.
SetEndEffectorSuctionCup(bool suck, bool isQueued, uint64_t *queuedCmdIndex); //error
SetEndEffectorSuctionCup(true, true, uint64_t *QueuedCmdIndex); //error
SetEndEffectorSuctionCup(true, true, &gQueuedCmdIndex); // no movement