請問是否有範例能教導
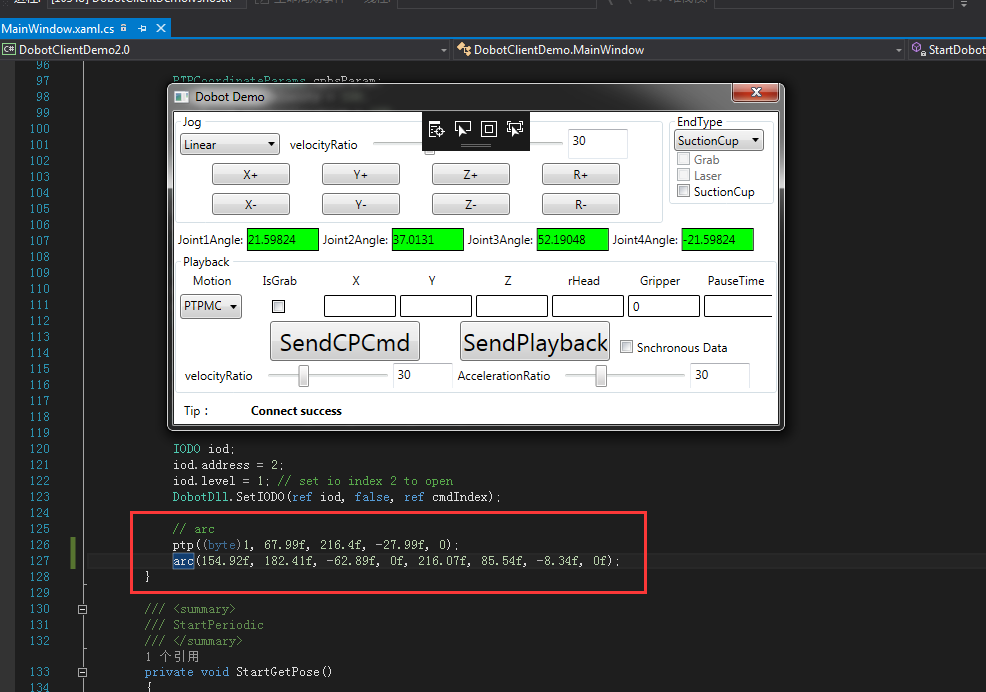
最基本的由外部程式(C#)
傳送座標讓二代DOBOT執行的方法
開發控制2代dobot基礎範例
Eric.Zhou
#5
抱歉,目前二代还没有安卓APP。现在安卓只能直接跑串口数据,安卓机和dobot用蓝牙方式连接后 安卓的app直接往串口丢数据。Android端的App或开发包暂时计划在年后开发。

抱歉,目前二代还没有安卓APP。现在安卓只能直接跑串口数据,安卓机和dobot用蓝牙方式连接后 安卓的app直接往串口丢数据。Android端的App或开发包暂时计划在年后开发。